

 Реферат: Распределенные алгоритмы
Реферат: Распределенные алгоритмы
(1)
Завершение. Каждый корректный процесс p останавливается на векторе
![]() с одним элементом для
каждого процесса.
с одним элементом для
каждого процесса.
(2) Соглашение. Векторы решения корректных процессов равны.
(3)
Зависимость. Если q корректен, то для корректного p, ![]() .
.
Согласованной непротиворечивости можно достичь множественными вещаниями:
каждый процесс вещает свой вход, и процесс p помещает свое решение в вещании q
в ![]() . Завершение, соглашение, и
зависимость непосредственно наследуются от соответствующих свойств алгоритма
вещания.
. Завершение, соглашение, и
зависимость непосредственно наследуются от соответствующих свойств алгоритма
вещания.
Так как каждый корректный процесс вычисляет один и тот же вектор (соглашение), большинство проблем решения легко решается с помощью детерминированной функции на векторе решения (что непосредственно гарантирует соглашение). Согласие, например, решается с помощью извлечения значения, имеющего большинство, из решающего вектора. Выбор решается извлечением самого маленького уникального идентификатора в векторе (остерегайтесь; избранный процесс может быть сбойным).
В предыдущих разделах было показано, что (когда рассматриваются детерминированные алгоритмы) синхронные системы имеют более высокую способность восстановления, чем асинхронные. Это было сделано для идеализированной модели синхронности, где процессы функционируют в импульсах. Более высокая способность восстановления модели импульса означает, что не возможно детерминированно устойчиво синхронизировать полностью асинхронные сети. В этом разделе будет показано, что устойчивая реализация модели импульса возможна в модели асинхронных сетей ограниченных задержек (ABD (asynchronous bounded-delay) сети - АСОЗ).
Модель АСОЗ характеризуется наличием локальных часов и верхней
границей на задержку сообщений. В описании и анализе алгоритмов мы используем кадр
реального времени (real-time frame), который
является назначением времени наступления ![]() каждому
событию. Согласно релятивистской физике, нет стандартного или предпочтительного
способа сделать это назначение; в дальнейшем будем предполагать, что физически
значимое назначение было выбрано. Кадр реального времени не поддается
наблюдению для процессов в системе, но процессы могут косвенно отслеживать
время, используя свои часы, значения которых связаны с реальным
временем. Часы процесса p обозначаются
каждому
событию. Согласно релятивистской физике, нет стандартного или предпочтительного
способа сделать это назначение; в дальнейшем будем предполагать, что физически
значимое назначение было выбрано. Кадр реального времени не поддается
наблюдению для процессов в системе, но процессы могут косвенно отслеживать
время, используя свои часы, значения которых связаны с реальным
временем. Часы процесса p обозначаются ![]() и он может читать и
записывать в них (запись в часы необходима для синхронизации). Значение часов
непрерывно изменяется во времени, если часы не назначены; мы пишем
и он может читать и
записывать в них (запись в часы необходима для синхронизации). Значение часов
непрерывно изменяется во времени, если часы не назначены; мы пишем ![]() , чтобы обозначить, что в
момент реального времени t часы содержат T.
, чтобы обозначить, что в
момент реального времени t часы содержат T.
Заглавные буквы (C, T) используются для времени часов, а строчные буквы (c, t) - для реального времени. Часы могут использоваться для управления наступлением событий, как в выражении
when ![]() then send message
then send message
rоторое вызывает посылку сообщения во
время ![]() . Функция
. Функция ![]() обозначается
обозначается ![]() .
.
Значение идеальных часов увеличивается на ![]() за
за ![]() единиц времени, то есть,
оно удовлетворяет
единиц времени, то есть,
оно удовлетворяет ![]() .
Синхронизированные идеальные часы никогда не нуждаются в корректировке, но, к
сожалению, они всего лишь (полезная) математическая абстракция. Часы,
используемые в распределенных системах, испытывают отклонение,
ограниченное маленькой известной константой
.
Синхронизированные идеальные часы никогда не нуждаются в корректировке, но, к
сожалению, они всего лишь (полезная) математическая абстракция. Часы,
используемые в распределенных системах, испытывают отклонение,
ограниченное маленькой известной константой ![]() (обычно
порядка
(обычно
порядка ![]() или
или ![]() ). Отклонение часов C
). Отклонение часов C ![]() -ограничено, если,
для
-ограничено, если,
для ![]() и
и ![]() , таких, что между
, таких, что между ![]() и
и ![]() не происходит присваивания
C,
не происходит присваивания
C,
![]() (14.1)
(14.1)
Различные часы в распределенных системах не показывают одно
и то же время часов в любой заданный момент реального времени, то есть, ![]() не обязательно справедливо.
Часы
не обязательно справедливо.
Часы ![]() -синхронизированы в
момент реального времени t, если
-синхронизированы в
момент реального времени t, если ![]() , и
, и ![]() -синхронизированы
момент часового времени T, если
-синхронизированы
момент часового времени T, если ![]() . Мы
считаем эти понятия эквивалентными; см. Упражнение 14.8. Цель алгоритмов
синхронизации часов состоит в том, чтобы достичь и поддерживать глобальную
. Мы
считаем эти понятия эквивалентными; см. Упражнение 14.8. Цель алгоритмов
синхронизации часов состоит в том, чтобы достичь и поддерживать глобальную ![]() -синхронизацию, то есть,
-синхронизацию, то есть, ![]() -синхронизацию между каждой
парой часов. Параметр
-синхронизацию между каждой
парой часов. Параметр ![]() - точность
синхронизации.
- точность
синхронизации.
Задержка сообщений ограничена снизу ![]() и сверху
и сверху ![]() , где
, где ![]() ; формально, если сообщение
посылается в реальное время
; формально, если сообщение
посылается в реальное время ![]() и
получается в реальное время
и
получается в реальное время ![]() , то
, то
![]() (14.2)
(14.2)
Так как выбор кадра реального времени свободный, предположения (14.1) и (14.2) относятся к временному кадру так же, как и к часам и системе связи.
В этом подразделе будет изучена степень точности, с которой
процесс p может настраивать свои идеальные часы на идеальные часы надежного
сервера s. У детерминированного протокола самая лучшая доступная точность - ![]() , и эта точность может быть
получена для простого протокола, который обменивается только одним сообщением.
Вероятностные протоколы могут достигать произвольной точности, но сложность по
сообщениям зависит от желательной точности и распределения времен доставки
сообщений.
, и эта точность может быть
получена для простого протокола, который обменивается только одним сообщением.
Вероятностные протоколы могут достигать произвольной точности, но сложность по
сообщениям зависит от желательной точности и распределения времен доставки
сообщений.
Теорема 14.12
Существует детерминированный протокол для синхронизирования ![]() с
с ![]() с точностью
с точностью ![]() , который обменивается одним
сообщением. Никакой детерминированный протокол не достигает более высокой точности.
, который обменивается одним
сообщением. Никакой детерминированный протокол не достигает более высокой точности.
Доказательство. Мы сначала представим простой протокол и
докажем, что он достигает точности, заявленной в теореме. Чтобы
синхронизировать ![]() , сервер посылает
одно сообщение, <time,
, сервер посылает
одно сообщение, <time, ![]() >. Когда p получает <time, Т>, он корректирует часы на T +
>. Когда p получает <time, Т>, он корректирует часы на T + ![]() .
.
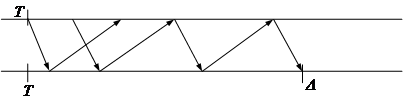
Чтобы доказать заявленную точность, назовем реальные
времена посылки и получения сообщения <time,
Т> ![]() и
и ![]() соответственно; теперь
соответственно; теперь ![]() . Так как часы идеальны,
. Так как часы идеальны, ![]() . Во время
. Во время ![]() , p корректирует часы, чтобы
на них было
, p корректирует часы, чтобы
на них было ![]() , поэтому
, поэтому ![]() . Теперь
. Теперь ![]() означает
означает ![]() .
.
 |
|||||
|
|||||
Страницы: 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24, 25, 26, 27, 28, 29, 30, 31, 32, 33, 34, 35, 36, 37, 38, 39, 40, 41, 42, 43, 44, 45, 46, 47, 48, 49, 50, 51, 52, 53, 54, 55, 56, 57, 58, 59, 60, 61, 62, 63, 64, 65, 66, 67, 68, 69, 70, 71, 72, 73, 74, 75, 76, 77, 78, 79, 80, 81, 82, 83, 84, 85, 86, 87, 88, 89, 90, 91, 92, 93, 94, 95, 96, 97, 98, 99, 100, 101, 102, 103, 104, 105 |
|||||
