

 Реферат: Кинематический и силовой расчёт механизма. Определение осевого момента инерции маховика. Проектирование профиля кулачкового механизма. Проектирование зубчатого зацепления. Проектирование планетарного механизма
Реферат: Кинематический и силовой расчёт механизма. Определение осевого момента инерции маховика. Проектирование профиля кулачкового механизма. Проектирование зубчатого зацепления. Проектирование планетарного механизма
![]()
Використовуючи теоретичний профіль кулачка як геометричне місце точок центрів ролика проводимо рід кіл радіусом rP.
Робочій профіль будуємо дотичною лінією до кіл радіусом rP.
4. Проектування зубчатого зачеплення.
4.1 Вихідні данні.
m - 3 (модуль зачеплення);
Y - 0.6 (коефіцієнт сприйнятого зміщення);
![]() (кількість зубців).
(кількість зубців).
4.2 Визначення розмірів геометричних параметрів.
Визначаємо радіуси ділильних кіл:
![]()
![]()
Визначаємо крок зачеплення:
![]()
Визначимо радіуси основних кіл:
![]()
![]()
де: α=20°
Визначаємо міжосьову відстань:
![]()
![]()
Визначимо кут зачеплення:

Визначаємо радіуси початкових кіл:
![]()
![]()
Визначаємо коефіцієнт зміщення:
![]()
![]()
![]()
Визначаємо коефіцієнт зміщення інструмента на шестерні:

![]()
Визначаємо радіуси кола западин:
![]()
![]()
де: ha*=1; C*=0,25.
Визначаємо радіуси кола виступів:
![]()
![]()
Визначаємо ширину зубців по ділильному колу:
![]()
![]()
Визначаємо висоту ніжки зубця:
![]()
Визначаємо висоту зубця:
![]()
Перевірка:
![]()
![]()
![]()
4.3 Проектування зачеплення.
Приймаємо висоту зубця на кресленні №4 – 50 мм.
Визначимо масштабний коефіцієнт:
![]()
Визначимо графічні розміри геометричних параметрів:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
На кресленні №4 проводимо
міжосьову відстань ![]() і отримуємо
центри коліс, точки О1 та О2 , з яких проводимо кола
радіусами
і отримуємо
центри коліс, точки О1 та О2 , з яких проводимо кола
радіусами ![]() . Проводимо загальну дотичну
до основних кіл. Відмічаємо точки дотику А та В. Визначаємо теоретичну лінію
зачеплення АВ. Проводимо початкові кола
. Проводимо загальну дотичну
до основних кіл. Відмічаємо точки дотику А та В. Визначаємо теоретичну лінію
зачеплення АВ. Проводимо початкові кола ![]() ,
вони повинні перетнутися в точці W, точці перетину лінії зачеплення і
лінії центрів.
,
вони повинні перетнутися в точці W, точці перетину лінії зачеплення і
лінії центрів.
Проводимо кола радіусами ![]() . Відрізок AW ділимо на
чотири частини і отримуємо точки 1, 2, 3, 4, які зносимо на коло
. Відрізок AW ділимо на
чотири частини і отримуємо точки 1, 2, 3, 4, які зносимо на коло ![]() і отримуємо точки
1’,2’,3’,4’, з яких проводимо дотичні до кола і зносимо на відповідні дотичні
відрізки W0, W1, W2, W3, W4 .
З’єднуємо точки і отримуємо профіль зубця. Проводимо вісь симетрії S1/2
і по закону симетрії добудовуємо іншу сторону зубця. Потім округлюємо зубець
радіусом округлення ρ. Аналогічно будуємо зубець і для другого колеса.
Робимо шаблони і добудовуємо ще по два зубця.
і отримуємо точки
1’,2’,3’,4’, з яких проводимо дотичні до кола і зносимо на відповідні дотичні
відрізки W0, W1, W2, W3, W4 .
З’єднуємо точки і отримуємо профіль зубця. Проводимо вісь симетрії S1/2
і по закону симетрії добудовуємо іншу сторону зубця. Потім округлюємо зубець
радіусом округлення ρ. Аналогічно будуємо зубець і для другого колеса.
Робимо шаблони і добудовуємо ще по два зубця.
4.4 Визначаємо величини параметрів якості.
Визначаємо коефіцієнт перекриття:

![]()
де: ab – практична лінія зачеплення
Визначимо коефіцієнти відносного ковзання:

де: Х – відстань від точки А до точки зачеплення
U1,2 – передаточне відношення
Визначаємо передаточне відношення:
![]()
Таблиця №5
Х мм |
0 | 20 | 40 | 60 | 80 | 100 | 120 | 140 | 166 |
|
λ1 |
-∞ | -4,38 | -1,32 | -0,3 | 0,21 | 0,51 | 0,72 | 0,86 | 1 |
|
λ2 |
1 | 0,81 | 0,57 | 0,23 | -0,26 | -1,06 | -2,54 | -6,31 | -∞ |
4.5 Проектування планетарної передачі.
4.5.1 Вихідні данні.
U1Н - -0,36 (передаточне відношення);
К - 3 (кількість сателітів).
Схема механізму (мал.8)
Z2 Z3
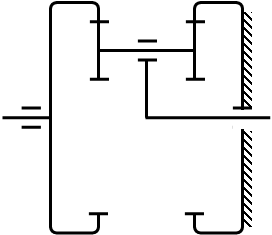
Z1 Z4
(мал. 8)
4.5.2 Розрахунок параметрів планетарної передачі.
Визначаємо кількість зубців:
![]()
![]()
![]()
![]()
![]()
Перевіряємо умову одноосності:
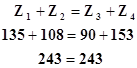
умова виконується
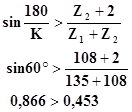
перевіряємо умову правильного зачеплення:
![]()
умова виконується
Перевіряємо умову сусідства:
умова виконується
Визначаємо діаметри ділильних кіл зубчастих коліс:
![]()
![]()
![]()
![]()
Визначаємо міжосьові відстані:
![]()
4.5.3 Побудова планів лінійних і кутових швидкостей.
Визначаємо масштабний коефіцієнт:
![]()
На кресленні №4 будуємо схему планетарного механізму у масштабі.
![]()
![]()
![]()
На схемі механізму відмічаємо точку А, полюс зачеплення коліс 1-2, точку В, та полюс зачеплення коліс 3-4. А також точку Н – центр колеса 3. Ці точки переносимо на базову лінію плану швидкостей.
Визначаємо лінійну швидкість точки А:
![]()
По горизонталі від базової лінії відкладаємо відрізок АА’.
Визначаємо масштабний коефіцієнт:
![]()
З’єднуємо точку А’ з полюсом Р, і отримуємо трикутник швидкості для колеса 1. З точки Н проводимо відрізок РН під кутом ΨН , отримуємо точку Н’ на перетині горизонталі проведеної з точки Н і відрізка Н’, з’єднавши яку з точкою А’ отримуємо трикутник швидкостей коліс 2 та 3.
Визначаємо кут ΨН:
![]()
Проводимо горизонталь на відстані КР, довільно беремо полюс і через нього проводимо промені паралельно відрізкам А’Р, АВ, РН’. На перетині їх з горизонталлю отримуємо а1, а2,3, аН, що і є планом лінійних швидкостей. Відрізок Ка1 є графічним зображенням кутової швидкості колеса 1.
Визначаємо масштабний коефіцієнт:
![]()
Визначаємо кутову швидкість коліс 2,3 і водила Н:
![]()
![]()
5. Використана література.
1. Левітська О.Н., Левітський Н.И. «Курс теорії механізмів та машин», - М.: Висш. шк., 1985. – 279 с., іл.
2. Кореняко А.С. та ін., «Курсове проектування по теорії механізмів та машин», - К.: Вища шк., 1970. – 332 с.
3. Артоболевський .І.І., «Теорія механізмів та машин», - М.: Наука, 1988. – 640 с.
4. Методичні вказівки.
