

 Реферат: Автоматизированный электропривод механизма перемещения стола продольно-строгального станка
Реферат: Автоматизированный электропривод механизма перемещения стола продольно-строгального станка
Принимаем величины сопротивлений
![]()
Емкость фильтров в цепи задания и обратной связи по току:
![]()
Емкость в цепи обратной связи усилителя DA1:

![]()
Сопротивления в цепи обратной связи усилителя DA1:

![]()
Емкость во входной цепи усилителя DA2

![]()
Сопротивление в обратной связи усилителя DA2:

Емкость фильтра на входе DA3:

![]()
Параметры элементов на входе форсирующего звена на входе DA3:
 , где
, где
![]()

8 РАСЧЕТ КОНТУРА РЕГУЛИРОВАНИЯ СКОРОСТИ
8.1 рАСЧЕТНАЯ СТРУКТУРНАЯ СХЕМА КОНТУРА РЕГУЛИРОВАНИЯ СКОРОСТИ
Согласно требованиям, предъявляемым к электроприводу, система регулирования скорости выполняется однократной (см. п. 6). Структурная схема контура скорости представлена на рис. 17. Контур регулирования тока настроен на модульный оптимум с наличием компенсации по ЭДС якоря - рассматриваем как фильтр Баттерворта II порядка.
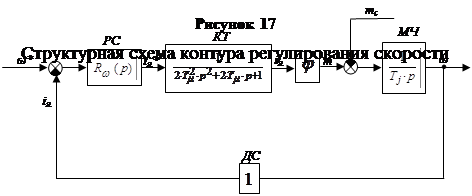 |
Контур скорости образуется регулятором скорости, контуром регулирования тока якоря. звеном умножения на поток, звеном механической части привода и обратной связью по скорости через датчик скорости (kдс = 1). На объект действует возмущающее воздействие - момент статического сопротивления.
8.2 расчет регулятора скорости
В однократной САР скорости, по условия настройки на модульный оптимум, регулятор скорости имеет передаточную функцию пропорционального звена:
 , где
, где
![]() ,
,
φ = 1, т.к. Ф = ФN = const.
Передаточная функция замкнутого контура скорости при настройке на модульный оптимум представляет собой фильтр Баттерворта III порядка:

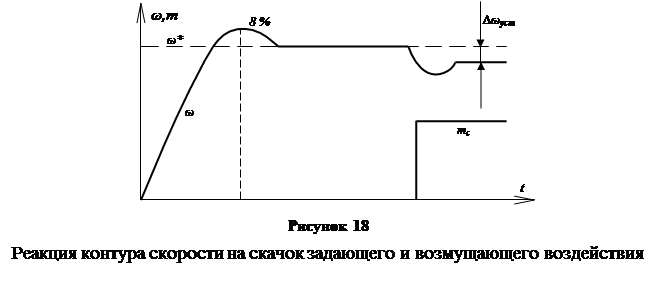
Реакция контура скорости на скачок задания на скорость
представлена на
рис. 18. такой процесс имеет место
при mc = 0 (на холостом ходу). Однократная САР обладает
астатизмом по возмущающему воздействию, поэтому появление нагрузки приведет к
статической ошибке по скорости. При ω* = 1 и mc = 1
(что соответствует в абсолютных единицах Mc =MN)
статическая ошибка будет равна:
8.3 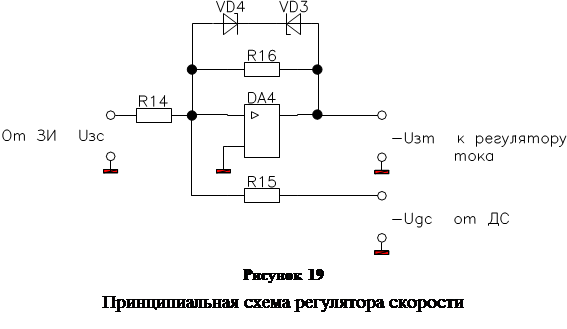
конструктивный расчет
Принимаем:
![]()
Сопротивление в цепи обратной связи DA4:
![]()
![]()
9 РАСЧЕТ ЗАДАТЧИКА ИНТЕНСИВНОСТИ
9.1 СТРУКТУРНАЯ СХЕМА ЗАДАТЧИКА ИНТЕНСИВНОСТИ
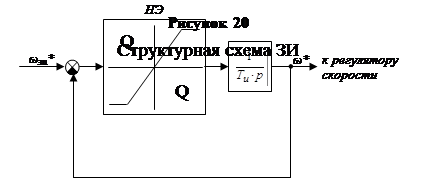 |
Задатчик интенсивности устанавливается на входе САР скорости и предназначен для формирования сигнала задания на скорость. ЗИ ограничивает темп нарастания снижения задания на скорость и тем самым обеспечивает, чтобы ускорение и динамический момент электропривода не превышали допустимых значений. Структурная схема ЗИ представлена на рис. 20.
Принцип действия ЗИ
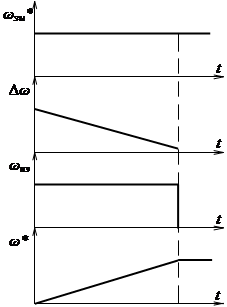 При поступлении на вход
ЗИ ступенчатого воздействия нелинейный элемент задатчика выходит на ограничение,
и на вход интегрирующего звена поступает неизменная величина ωнэ
= Q. На выходе интегратора появляется линейно возрастающий сигнал.
При поступлении на вход
ЗИ ступенчатого воздействия нелинейный элемент задатчика выходит на ограничение,
и на вход интегрирующего звена поступает неизменная величина ωнэ
= Q. На выходе интегратора появляется линейно возрастающий сигнал.
|
9.2 расчет параметров Зи
Темп ЗИ представляет собой величину ускорения электропривода в относительных единицах:

Принимаем постоянную времени интегратора Ти = 0,25 с. При этом величина ограничения нелинейного элемента составит:
![]()
![]()
В абсолютных единицах ограничение соответствует 10 В.
Установившийся динамический момент при разгоне с темпом А:
![]()
![]()
Проверим выполнение условия:
![]()
![]()
Из пункта 3:
![]()
Установившаяся динамическая ошибка по скорости при разгоне с темпом А:
![]()
![]()
9.3 конструктивный РАСЧЕТ
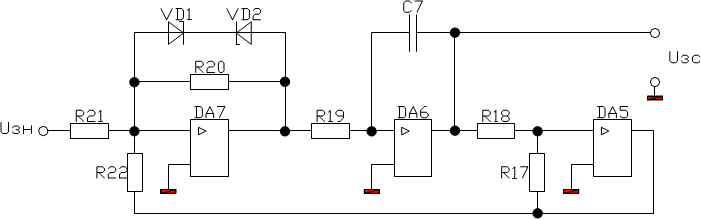
Принципиальная схема ЗИ представлена на рис. 22.
Нелинейный элемент реализуется на операционном усилителе DA7 за счет включения в обратную связь пары стабилитронов VD6 и МВ7. Интегратор реализуется на операционном усилителе DA6. Усилитель DA5 предназначен для инвертирования сигнала.
Принимаем:
![]()
Коэффициент усиления линейной зоны нелинейного элемента принимаем равным 100.
![]()
Емкость в обратной связи интегратора:


![]()
10 КОМПЬЮТЕРНОЕ МОДЕЛИРОВАНИЕ САР СКОРОСТИ
ЛИТЕРАТУРА
1. Типовые задания к курсовому проекту по основам электропривода / Томашевский Н.И., Шрейнер Р.Т. и др. - Свердловск: СИПИ, 1989. - 48 с.
2.
Справочные данные по элементам электропривода: Методические указания к
курсовому проекту по дисциплине "Теория электропривода" / И.Я.
Браславский
А.М. Зюзев и др. - Екатеринбург: УГТУ, 1995. - 56с.
3. Расчет полупроводникового преобразователя системы ТП-Д: Методические указания к курсовой работе по курсу "Электронные микропроцессорные и преобразовательные устройства" /В.И. Лихошерст. Свердловск: УПИ, 1990. - 37 с.
4. Комплектные тиристорные электроприводы: Справочник / И.Х. Евзеров, А.С. Горобец и др.; под ред. В.М. Перельмутера. - М.: Энергоатомиздат, 1988. - 319 с.
5. Шрейнер Р.Т. Однозонные системы автоматического управления скоростью электроприводов: Учебно-методическая разработка к курсовому проектированию по дисциплине "Системы автоматического управления электроприводами". - Свердловск: СИПИ, 1985. - 77 с.
