

 Реферат: Автоматизированный электропривод механизма перемещения стола продольно-строгального станка
Реферат: Автоматизированный электропривод механизма перемещения стола продольно-строгального станка
Реферат: Автоматизированный электропривод механизма перемещения стола продольно-строгального станка
Министерство
общего и профессионального образования
Российской Федерации
Уральский государственный профессионально-педагогический университет
Кафедра электрооборудования и автоматизации промышленных предприятий
Предмет: "Автоматизированный электропривод"
Тема: "Автоматизированный электропривод механизма перемещения стола продольно-строгального станка."
Выполнил:
Студент гр.СОЗ382 Калабин А.А.
Проверил: Сусенко О.С.
г. Сарапул
2001год.
ВВЕДЕНИЕ................................................................................................................................................................................. 3
1 ИСХОДНЫЕ ДАННЫЕ...................................................................................................................................................... 4
2 ВЫБОР ТИПА ЭЛЕКТРОПРИВОДА............................................................................................................................ 6
3 ВЫБОР И ПРОВЕРКА ЭЛЕКТРОДВИГАТЕЛЯ....................................................................................................... 7
3.1 РАСЧЕТ НАГРУЗОЧНОЙ ДИАГРАММЫ МЕХАНИЗМА................................................................................ 7
3.2 ПРЕДВАРИТЕЛЬНЫЙ ВЫБОР ДВИГАТЕЛЯ...................................................................................................... 9
3.3 РАСЧЕТ НАГРУЗОЧНОЙ ДИАГРАММЫ ДВИГАТЕЛЯ................................................................................ 11
3.4 Проверка двигателя по нагреву............................................................................................................. 17
4 ВЫБОР ОСНОВНЫХ УЗЛОВ СИЛОВОЙ ЧАСТИ............................................................................................... 18
4.1 ВЫБОР ТИРИСТОРНОГО ПРЕОБРАЗОВАТЕЛЯ.............................................................................................. 18
4.2 ВЫБОР СИЛОВОГО ТРАНСФОРМАТОРА......................................................................................................... 18
4.3 выбор сглаживающего реактора.......................................................................................................... 20
4.4 принципиальная электрическая схема силовой части.................................................... 21
5 МАТЕМАТИЧЕСКАЯ МОДЕЛЬ СИЛОВОЙ ЧАСТИ ЭЛЕКТРОПРИВОДА.............................................. 23
5.1 РАСЧЕТ ЭКВИВАЛЕНТНЫХ ПАРАМЕТРОВ СИСТЕМЫ............................................................................ 23
5.2 Переход к системе относительных единиц................................................................................. 24
5.3 структурная схема объекта управления....................................................................................... 26
6 ВЫБОР ТИПА СИСТЕМЫ РЕГУЛИРОВАНИЯ СКОРОСТИ.......................................................................... 27
7 РАСЧЕТ КОНТУРА РЕГУЛИРОВАНИЯ ТОКА ЯКОРЯ
И ЦЕПИ КОМПЕНСАЦИИ ЭДС ЯКОРЯ............................................................................................................................................. 30
7.1 ВЫБОР КОМПЕНСИРУЕМОЙ ПОСТОЯННОЙ................................................................................................ 30
7.2 расчет контура регулирования тока якоря.................................................................................. 30
7.2.1 Расчетная структурная схема контура тока........................................................................................... 30
7.2.2 Передаточная функция регулятора тока................................................................................................... 31
7.2.3 Компенсация влияния ЭДС якоря двигателя.............................................................................................. 32
7.2.4 Реализация датчика ЭДС................................................................................................................................ 33
7.3 Конструктивный РАСЧЕТ............................................................................................................................... 33
8 РАСЧЕТ КОНТУРА РЕГУЛИРОВАНИЯ СКОРОСТИ........................................................................................ 36
8.1 рАСЧЕТНАЯ СТРУКТУРНАЯ СХЕМА КОНТУРА РЕГУЛИРОВАНИЯ СКОРОСТИ............................ 36
8.2 расчет регулятора скорости..................................................................................................................... 36
8.3 конструктивный расчет............................................................................................................................... 37
9 РАСЧЕТ ЗАДАТЧИКА ИНТЕНСИВНОСТИ........................................................................................................... 39
9.1 СТРУКТУРНАЯ СХЕМА ЗАДАТЧИКА ИНТЕНСИВНОСТИ....................................................................... 39
9.2 расчет параметров Зи..................................................................................................................................... 40
9.3 конструктивный РАСЧЕТ............................................................................................................................... 40
10 КОМПЬЮТЕРНОЕ МОДЕЛИРОВАНИЕ САР СКОРОСТИ........................................................................... 42
ЛИТЕРАТУРА......................................................................................................................................................................... 43
ВВЕДЕНИЕ
|
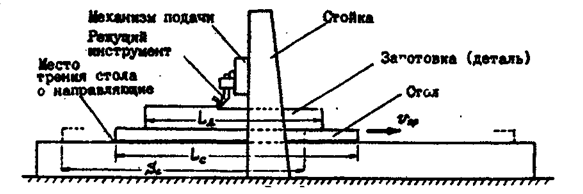 |
Процесс обработки детали на продольно-строгальном станке поясняет
рис. 1. Снятие стружки происходит в течение рабочего (прямого) хода, при обратном движении резец поднят, а стол перемещается на повышенной скорости. Подача резца производится периодически от индивидуального привода во время холостого хода стола в прямом направлении. Поскольку при строгании резец испытывает ударную нагрузку, то значения максимальных скоростей, строгания не превосходят 75-120 м/мин (в отличие от скоростей точения и шлифования 2000 м/мин и более). Под скоростью строгания (резания) понимают линейную скорость Uпр перемещения закрепленной на столе детали относительно неподвижного резца на интервале рабочего хода стола. При этом скорость входа резца в металл и скорость выхода резца из металла в сравнении со скоростью строгания ограничиваются до 40 % и менее в зависимости от обрабатываемого материала, чтобы избежать скалывания кромки. Указанные обстоятельства ограничивают производительность и для ее повышения остается только сократить непроизводительное время движения: обратный ход осуществляется на повышенной скорости Uоб > Uпр, а пускотормозные режимы при реверсе принимают допустимо минимальной продолжительности. Хороший эффект в этом дает двухдвигательный привод. Он должен быть управляемым по скорости, поскольку для различных материалов (в соответствии с технологией обработки и свойствами материалов) используются различные оптимальные или максимально допустимые скорости строгания; кроме того, движение характеризуется различными скоростями на разных интервалах времени рабочего цикла, высокой частотой реверсирования с большими пускотормозными моментами. Применяют двух- и одно-зонное управление скоростью.
1
ИСХОДНЫЕ ДАННЫЕ

Таблица 1
Исходные данные
|
Исходные данные |
Условные обозначения |
Значение |
| Усилие резания |
Fz |
170000 Н |
| Скорость рабочего хода |
Vпр |
0,4 м/с |
| Скорость обратного хода |
Vобр |
0,8 м/с |
| Масса стола |
mc |
15000 кг |
| Масса детали |
mд |
23000 кг |
| Радиус ведущей шестерни |
rш |
0,25 м |
| Длинна детали |
Lд |
4 м |
| Путь подхода детали к резцу |
Lп |
0,2 м |
| Путь после выхода резца из металла |
Lв |
0,15 м |
| Коэффициент трения стола о направляющие |
μ |
0,06 |
| КПД механической передачи при рабочей нагрузке |
ηпN |
0,95 |
| КПД механических передач при перемещении стола на холостом ходу |
ηпхх |
0,5 |
