

 Реферат: Синтез системы автоматического регулирования массы квадратного метра бумажного полотна
Реферат: Синтез системы автоматического регулирования массы квадратного метра бумажного полотна
Реферат: Синтез системы автоматического регулирования массы квадратного метра бумажного полотна
САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНОЛОГИЧЕСКИЙ УНИВЕРСИТЕТ РАСТИТЕЛЬНЫХ ПОЛИМЕРОВ
Кафедра АХТП
КУРСОВАЯ РАБОТА
по
ТЕОРИИ УПРАВЛЕНИЯ
«СИНТЕЗ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ МАССЫ КВАДРАТНОГО МЕТРА БУМАЖНОГО ПОЛОТНА
ПО ЗАДАННЫМ КРИТЕРИЯМ КАЧЕСТВА»
Выполнил: студент V курса .
Ситников С. А. .
шифр 965-450 .
Проверил: преподаватель .
Селянинова Л. Н. .
С.-ПЕТЕРБУРГ
2000г.
|
№ |
Наименование элементов схемы АСР, их математическая модель, параметры модели. Рассматриваемые воздействия. Требования к проектируемой системе регулирования. |
Обозначения переменных. |
Размерность переменных |
Значение |
| 1 | 2 | 3 | 4 | 5 |
| 1. |
Объект регулирования. Канал: “изменение расхода массы - изменение массы 1 м2 полотна”. Математическая модель объекта: Wоб(р) = К0 Параметры модели: - постоянная времени объекта - коэффициент передачи объекта - запаздывание по рассматриваемому каналу передачи информации |
Т К0 t
|
с с |
50 112 120 |
| 2. |
Измерительное устройство, датчик электронный с преобразователем. Математическая модель датчика: Параметр модели: коэффициент передачи |
Кд
|
ma |
0,25 |
| 3. |
Регулирующий блок /совокупность электронного регулятора и электродвигателя/ приближенно реализует ПИ-закон регулирования. Математическая модель регулирующего блока:
К1 - пропорциональная составляющая закона регулирования К2 - интегральная составляющая закона регулирования
|
К1 К2 |
||
| 4. |
Регулирующий орган: клапан Модель клапана:
Параметры модели: коэффициент передачи |
Кро |
|
0,0104 |
| 5. |
Требования к качеству работы проектируемой системы: 1. Точность регулирования массы 1 м2 полотна 2. Минимальное значение степени затухания |
e ' |
г/м2 |
0,4 0,75 |
| 6. |
Типовые входные воздействия: 1. Изменение задающего воздействия: 2. Изменение концентрированной массы:
|
С1 С2 |
г/м2 % конц. |
1,5 -3 |
| 7. |
Канал передачи возмущения: “Изменение
концентрации массы” – “изменение массы 1 м2 полотна”
|
Кf1Тf1 |
с |
1,1 60 |
 :
: Задача
Цель создания автоматической системы – достичь того, чтобы значение массы 1 кв. м. бумажного полотна было равно заданному. При этом требуется, чтобы точность регулирования, т.е. возможное отклонение, находилось в определенных пределах. Поэтому, для синтеза системы выбран принцип управления по отклонению регулируемой величины от задания.
Принцип работы
Объект регулирования – напорный ящик БДМ.
Регулируемая величина – масса 1 кв.м. полотна.
Регулирующая величина – расход массы.
Возмущающее воздействие – изменение концентрации массы.
Автоматический регулятор – средство решения задачи регулирования.
Автоматический регулятор состоит из электронного датчика измеряющего массу 1 кв.м. полотна, регулирующего блока (электрорегулятор и электродвигатель), приблизительно соответствующего ПИ-закону регулирования, клапана, изменяющего расход бумажной массы.
1. - бак массы
2. – напорный ящик
3. – сушильные группы
4. – каландр
5. – датчик массы 1кв.м. полотна
6. – преобразователь
7. – регулятор
8. – эл. двигатель - исполнительный механизм
9. – регулирующий орган - клапан
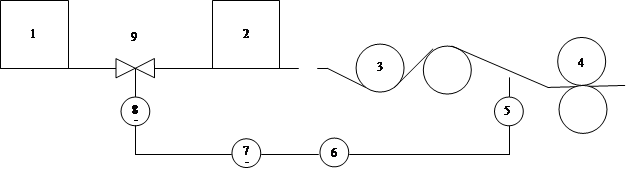
 Функциональная схема системы.
Функциональная схема системы.
![]()
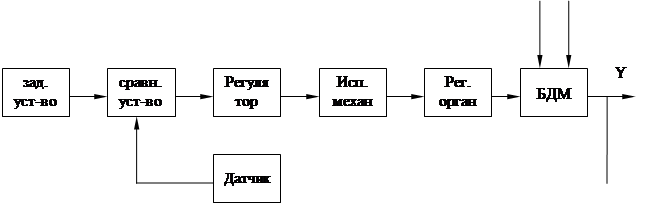
Текущее значение массы 1 кв.м. полотна фиксируется датчиком. Через преобразователь на регулирующий блок подается электрический сигнал. В регулирующем блоке происходит сравнение поступившего сигнала с заданным значением. В результате сравнения полученное отклонение определяет величину управляющего воздействия, которое должно нейтрализовать отклонение. В зависимости от величины и знака управляющего воздействия, управляющий блок формирует воздействие на исполнительный механизм (эл. двигатель).
Модель системы управления в виде «черного ящика»

Δg(t) [кг/м3] – изменение расхода бумажной массы (задающее воздействие)
Δf(t) [%] - изменение концентрации массы (возмущающее воздействие)
Δy(t) [г/м2] – изменение массы 1кв.м. полотна (выходная переменная)
Временные характеристики по каналу управления.
Передаточная функция объекта регулирования.
Wоб(р) = К0 ![]()
![]()
-
коэффициент
передачи ![]()
- постоянная времени Т =50 с
- запаздывание информации t =120 с
Это апериодическое звено 1-го порядка с запаздыванием.
Переходная функция h(t) определяется как переходной процесс на выходе звена при подаче на его вход единичного ступенчатого воздействия 1[t] при нулевых начальных условиях. Чтобы получить переходную функцию звена, нужно изменить его входной сигнал на одну единицу. (расход массы на 1кг/с).
|
