

 Реферат: Разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппарата
Реферат: Разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппарата
Важным свойством динамической системы ориентации является: если осями ориентации являются поступательно движущиеся оси, то при соответствующем законе управления вместо сложных пространственных поворотов космического аппарата можно изучать три независимых плоских угловых движения, что мы и сделаем в системе, т.е.:
 (3.4)
(3.4)
получено три независимых уравнения.
Закон управления формируется путем сложения позиционного сигнала jj и скоростного сигнала wj, умноженного на коэффициент усиления kj (j=x, y, z):
![]() . (3.5)
. (3.5)
Усложним рассматриваемую модель. Для этого будем рассматривать ее как упругое тело [1, 3, 6-12]. Уравнения осцилляторов для упругой модели имеет вид:
 (3.6)
(3.6)
где ![]() - коэффициент демпфирования
для каждой отдельно взятой гармоники.
- коэффициент демпфирования
для каждой отдельно взятой гармоники.
![]() - квадрат собственной
частоты не демпфированных колебаний для каждой гармоники.
- квадрат собственной
частоты не демпфированных колебаний для каждой гармоники.
![]() - управляющий момент с
учетом возможного отказа. i = 1,2,3,4. Коэффициенты
- управляющий момент с
учетом возможного отказа. i = 1,2,3,4. Коэффициенты ![]()
![]()
![]() мы
берем из таблицы, приведенной в приложении А.
мы
берем из таблицы, приведенной в приложении А.
При нулевой правой части, мы получаем свободные колебания, зависящие от начальных отклонений, угловых скоростей и др. При ненулевой правой части мы получаем вынужденные колебания, которые накладываются на свободные колебания. Они являются затухающими со временем, в силу коэффициента демпфирования. Прототипом для данной упругой модели послужил маятник на пружинке. Рассматриваемая система является линейной [1].
3.2 Моменты внешних сил, действующие на космический аппарат
3.2.1 Аэродинамический момент
Взаимодействие корпуса [1, 3] движущегося с большой скоростью космического аппарата с разряженной атмосферой больших высот вызывает появление аэродинамических сил и моментов. Первые приводят главным образом к постепенному торможению космического аппарата и связанного с этим эволюции его орбиты, в конечном итоге приводящей к падению на поверхность планеты ее искусственных спутников. А вторые к появлению внешних моментов, иногда благотворно, а чаще неблаготворно сказывающихся на режимах ориентации.
Особенностью аэродинамического взаимодействия корпуса космического аппарата с внешней средой [1, 3] является то, что вследствие малой плотности среды длина свободного пробега молекул атмосферы не может считаться малой по сравнению с характерными линейными размерами корпуса космического аппарата. В результате соударение "отскочившей" от поверхности космического аппарата молекулы внешней среды с другой такой молекулой происходит на большом удалении от него, что позволяет считать, что каждая молекула атмосферы взаимодействует с корпусом космического аппарата независимо от других. Это приводит не к обычной в аэродинамике схеме обтекания тела сплошной среды, а к картине "бомбардировки" такого тела отдельными молекулами.
Взаимодействие молекул разряженной среды с поверхностью твердого тела мыслимо идеализировать двояким образом: либо как упругое соударение с мгновенным зеркальным отражением молекулы, либо считать, что при соударении молекула отдает всю свою энергию телу, приходит с ним в температурное равновесие, а затем выходит во внешнее пространство с тепловой скоростью. Поскольку тепловая скорость молекулы невелика по сравнению со скоростью движения космического аппарата, последнюю схему можно считать схемой абсолютно упругого удара. Вторая из приведенных схем значительно лучше описывает наблюдаемые на практике явления и поэтому кладется в основу расчетов. Однако фактически происходят как упругие, так и неупругие соударения, и в более тонких расчетах следует учитывать долю тех и других [1, 3, 6].
Если по аналогии с обычной аэродинамикой считать, что возникающие силы взаимодействия тела и среды пропорциональны скоростному напору
 ; (3.7)
; (3.7)
где ![]() - плотность внешней среды,
- плотность внешней среды,
![]() - относительная скорость
тела и среды, то элементарная сила, действующая на площадку dS,
будет:
- относительная скорость
тела и среды, то элементарная сила, действующая на площадку dS,
будет:
 ; (3.8)
; (3.8)
здесь ![]() - некоторый коэффициент, а
- некоторый коэффициент, а
![]() - угол между внешней
нормалью к элементарной площадке dS и вектором скорости этой
площадки относительно внешней среды. Написанное соотношение является
следствием закона сохранения импульса, и легко убедиться, что для абсолютно
неупругого удара с=2.
- угол между внешней
нормалью к элементарной площадке dS и вектором скорости этой
площадки относительно внешней среды. Написанное соотношение является
следствием закона сохранения импульса, и легко убедиться, что для абсолютно
неупругого удара с=2.
Элементарный аэродинамический момент относительно центра масс
![]() ; (3.9)
; (3.9)
где r — радиус-вектор площадки dS, имеющий начало в центре масс тела, а полный момент
 ; (3.10)
; (3.10)
В последнем выражении интегрирование производится по той части поверхности
космического аппарата S,
которая омывается внешней средой при его движении.
Входящая в (3.8), а, следовательно,
и в (3.10) скорость V, строго говоря,
складывается из скорости движения центра масс ![]() и линейных скоростей элемянтарных площадок внешней поверхности корпуса
космического аппарата, связанных с его вращением
вокруг центра масс. Первое слагаемое
и линейных скоростей элемянтарных площадок внешней поверхности корпуса
космического аппарата, связанных с его вращением
вокруг центра масс. Первое слагаемое ![]() , связанное с
, связанное с ![]() , будет, поэтому
функцией конфигурации омываемой части корпуса, а,
следовательно, функцией конфигурации внешней поверхности космического аппарата
и его положения относительно вектора скорости
, будет, поэтому
функцией конфигурации омываемой части корпуса, а,
следовательно, функцией конфигурации внешней поверхности космического аппарата
и его положения относительно вектора скорости ![]() . Второе слагаемое, кроме
того, будет являться функцией угловой скорости
космического аппарата. Сравнение модуля скорости
. Второе слагаемое, кроме
того, будет являться функцией угловой скорости
космического аппарата. Сравнение модуля скорости ![]() с наибольшим возможным значением модуля линейной скорости внешней поверхности космического аппарата, порожденной его
вращением вокруг центра масс, показывает, что вторым слагаемым в задачах
активной ориентации космических аппаратов можно пренебрегать [1 ,3, 12]. Это связано как с очень
малыми угловыми скоростями, так и с относительно небольшими размерами современных
космических аппаратов. Поэтому всюду будет делаться предположение о равенстве нулю внешнего аэродинамического момента, связанного с вращением космического аппарата вокруг его центра масс. В этой же
связи скорость V в выражении (3.8) может быть
определена равенством
с наибольшим возможным значением модуля линейной скорости внешней поверхности космического аппарата, порожденной его
вращением вокруг центра масс, показывает, что вторым слагаемым в задачах
активной ориентации космических аппаратов можно пренебрегать [1 ,3, 12]. Это связано как с очень
малыми угловыми скоростями, так и с относительно небольшими размерами современных
космических аппаратов. Поэтому всюду будет делаться предположение о равенстве нулю внешнего аэродинамического момента, связанного с вращением космического аппарата вокруг его центра масс. В этой же
связи скорость V в выражении (3.8) может быть
определена равенством ![]() .
.
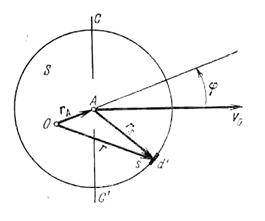 Пусть космический аппарат имеет форму сферы, тогда
численное значение аэродинамического момента действующего на сферу, и при
Пусть космический аппарат имеет форму сферы, тогда
численное значение аэродинамического момента действующего на сферу, и при ![]() будет равно
будет равно
![]() (3.11)
(3.11)
Полученное
выражение говорит о том, что при поворотах вокруг центра масс космический
аппарат сферической формы имеет два положения равновесия, соответствующие ![]() и
и ![]() . Если направление отсчета
расположения центра давления относительно центра масс взять по направлению
вектора
. Если направление отсчета
расположения центра давления относительно центра масс взять по направлению
вектора ![]() , то первое положение
равновесия характеризуется расположением центра масс за центром сферы (задняя
центровка), а второе расположением центра масс перед центром сферы (передняя
центровка). Рассматривая изменение аэродинамического момента в функции угла
, то первое положение
равновесия характеризуется расположением центра масс за центром сферы (задняя
центровка), а второе расположением центра масс перед центром сферы (передняя
центровка). Рассматривая изменение аэродинамического момента в функции угла ![]() в окрестности положения
равновесия, можно написать [8]:
в окрестности положения
равновесия, можно написать [8]:
 ; (3.12)
; (3.12)
Это
даст для задней центровки  , а для
передней
, а для
передней  . Знаки приведенных производных говорят о том, что при задней центровке
. Знаки приведенных производных говорят о том, что при задней центровке  космический аппарат
статически неустойчив (возникающий момент имеет тот же знак, что и отклонение),
а при передней центровке
космический аппарат
статически неустойчив (возникающий момент имеет тот же знак, что и отклонение),
а при передней центровке — устойчив.
— устойчив.
Это указывает на основную закономерность, характерную для аэродинамических моментов, возникающих при космическом полете: возникновение моментов связано с силами сопротивления и зависит от расположения линий действия этих сил относительно центра масс. При более сложных конфигурациях космических аппаратов расчет заметно усложняется, приходится учитывать взаимное затенение элементов конструкции, переменность (зависимость от угла поворота) омываемой потоком поверхности S и т.п. Однако и в этих громоздких расчетах фактически сохраняется приведенная методика. Результаты подобных расчетов, как правило, представляются в виде зависимостей аэродинамических коэффициентов моментов от соответствующих углов, характеризующих положение тела относительно вектора скорости центра масс [1, 3, 8].
Страницы: 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24, 25
