

 Реферат: Разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппарата
Реферат: Разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппарата
получено три независимых уравнения.
Пусть двигатели работают в импульсном режиме [1, 4, 6, 11, 12]. Зона нечувствительности определяется условием:
![]() .
(4.28)
.
(4.28)
Для изучения нужного динамического процесса, коэффициенты k в законе управления (Рис. 4.2):
![]() ;
(4.29)
;
(4.29)
должны быть
положительны. Сигнал управления формируется путем сложения сигналов датчика
угла и датчика угловых скоростей. Включение двигателей происходит при ![]() . Диаграмма зависимости
управляющего момента
. Диаграмма зависимости
управляющего момента ![]() от сигнала
от сигнала ![]() имеет вид ( рис 4.3 ) [1 ,3 , 25].
имеет вид ( рис 4.3 ) [1 ,3 , 25].
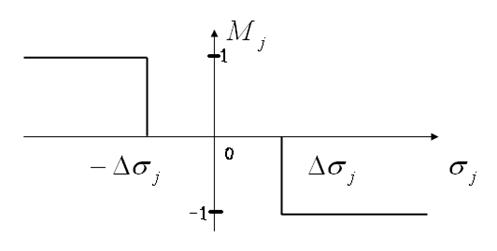
Рис. 4.2 - Закон управления
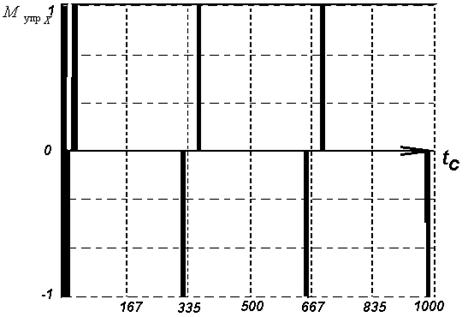
Рис. 4.3 - Изменение управляющего момента со временем в канале X:
Фазовая диаграмма процесса установления ориентации имеет вид (рис
4.2). Заштрихованная область – это комбинация значений ![]() , при которых действует
управляющий момент [6]. Линии
, при которых действует
управляющий момент [6]. Линии ![]() являются
линиями переключения, т.е. при пересечении этих линий изображающей точкой
происходит включение (или выключение) исполнительных органов системы
ориентации. Указанные линии походят через точки
являются
линиями переключения, т.е. при пересечении этих линий изображающей точкой
происходит включение (или выключение) исполнительных органов системы
ориентации. Указанные линии походят через точки ![]() на
оси абсцисс, а их наклон зависит от коэффициента k [1,
3, 25]:
на
оси абсцисс, а их наклон зависит от коэффициента k [1,
3, 25]:
 ;
(4.30)
;
(4.30)
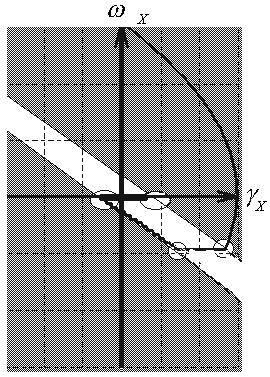
Рис. 4.4 - Фазовый портрет
Также вводятся дополнительные зоны нечувствительности: ![]() ,
,![]() -
нижняя и верхняя линии переключения, располагающиеся параллельно оси абсцисс.
Они предназначены для «гашения» больших начальных угловых скоростей [25]. При
пересечении этих линий изображающей точкой происходит включение (или
выключение) исполнительных органов системы ориентации. Соответственно
дополнительная зона нечувствительности находится между
-
нижняя и верхняя линии переключения, располагающиеся параллельно оси абсцисс.
Они предназначены для «гашения» больших начальных угловых скоростей [25]. При
пересечении этих линий изображающей точкой происходит включение (или
выключение) исполнительных органов системы ориентации. Соответственно
дополнительная зона нечувствительности находится между ![]() , и
, и ![]() . Фазовый портрет при больших
начальных угловых скоростях приведен на (Рис. 4.5)
. Фазовый портрет при больших
начальных угловых скоростях приведен на (Рис. 4.5)
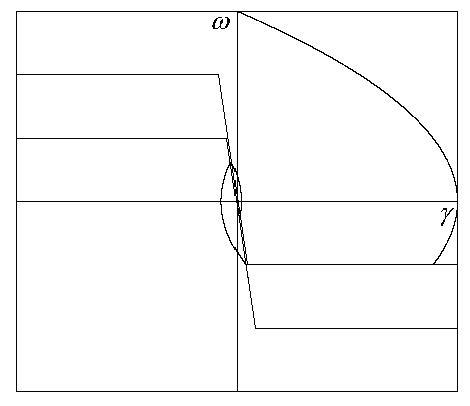
Рис. 4.5 - Фазовый портрет с большими начальными угловыми скоростями
Также вводится гистерезис, ![]() -
предназначенный для гашения шумов при «скольжении» фазовой диаграммы по линии
переключения с наклоном -1/K [3].
-
предназначенный для гашения шумов при «скольжении» фазовой диаграммы по линии
переключения с наклоном -1/K [3].
Рассмотрим КА как упругое тело [1.3.6.7,9,10,11.12]. Уравнения осцилляторов для упругой модели имеет вид [5]:
 (4.31)
(4.31)
где ![]() - коэффициент демпфирования
для каждой отдельно взятой гармоники.
- коэффициент демпфирования
для каждой отдельно взятой гармоники.
![]() - квадрат собственной
частоты не демпфированных колебаний для каждой гармоники.
- квадрат собственной
частоты не демпфированных колебаний для каждой гармоники. ![]() - управляющий момент с
учетом возможного отказа. i = 1,2,3,4. Коэффициенты
- управляющий момент с
учетом возможного отказа. i = 1,2,3,4. Коэффициенты ![]()
![]()
![]() мы
берем из таблицы, приведенной в Приложении А.
мы
берем из таблицы, приведенной в Приложении А.
При нулевой правой части, мы получаем свободные колебания, зависящие от начальных отклонений, угловых скоростей и др. При ненулевой правой части мы получаем вынужденные колебания, которые накладываются на свободные колебания. Они являются затухающими со временем, в силу коэффициента демпфирования. Прототипом для данной упругой модели послужил маятник на пружинке. Рассматриваемая система является линейной.
Находим, также как для абсолютно твердого тела, угловые скорости, угловые ускорения, с учетом возможных отказов [25, 26].
Введем в имитационную модель космического аппарата наряду с двигателями большой тяги – двигатели малой тяги. Будем рассматривать двигатели дросселированной тяги, т.е. реактивные двигатели могут работать как с большой тягой, так и с малой. Введем дополнительную зону нечувствительности для двигателей большой тяги. Для более эффективного гашения шумов введем паузу по времени при выходе из зон нечувствительности. Для наглядности введем паузу Tp = 3 сек. Тогда, фазовый портрет для упругой модели, с учетом работы двигателей малой тяги и действующих на космический аппарат аэродинамического и гравитационного моментов, имеет вид (рис 4.6). Так как задана достаточно большая пауза, то процесс может, получился неустойчивым. Таким образом, очень важным фактором является правильный выбор паузы [25].
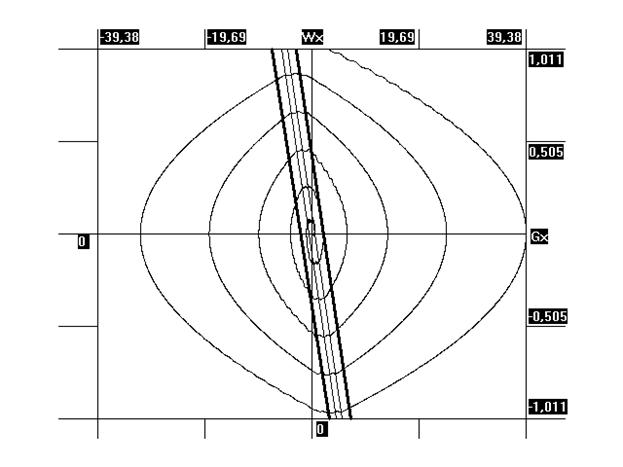
Рис. 4.6 - Фазовый портрет для большой паузы
Разработанный алгоритм позволяет моделировать сложные физические процессы с учетом внешних факторов действующих во время полета космического аппарата [1, 3, 25].
4.5 Решение задачи идентификации отказов
Алгоритм обработки данных в бесплатформенной инерциальной навигационной системе строится с использованием субоптимального дискретного фильтра Калмана [7, 16, 22, 25, 27].
Для малых угловых отклонений осей ССК от БСК и при условии Ix» Iy» Iz уравнения (1.1) и (1.2) запишем в виде [25]:
Тогда для построения системы оценки вектора состояния (jj, wj, mвj) примем следующую модель объекта наблюдения [16, 22, 27]:
 (4.32)
(4.32)
где mj=МДСj /Jj - эффективность управляющего момента;
МДСj - управляющий момент ДС;
mвj=Мвj /Jj - эффективность возмущающего момента;
uj - сигнал управления ДС;
j=x, y, z.
Запишем систему уравнений (4.32) в стандартной векторно-матричной форме, дополнив ее уравнением измерений [7]:
где xj = (x1j, x2j, x3j)T=(jj, wj, mвj)T - вектор состояния;
zj - вектор измерений;
xj - шум измерений;
 ,
,
j=x, y, z.
Используя критерий Калмана, несложно показать, что такая система является полностью наблюдаема [7, 16, 22, 25, 26, 27]:
rank[HT ATHT (AT)2HT]=n=3, где n - порядок системы.
Реализация в бортовом вычислителе дискретного фильтра Калмана сводится к оценке вектора состояния по следующим соотношениям [25, 27]:
![]()
![]() (4.33)
(4.33)
![]()
![]()
где: ![]() - оценка вектора состояния;
- оценка вектора состояния;
 - переходная матрица для вектора состояния;
- переходная матрица для вектора состояния;
![]() - матрица измерений;
- матрица измерений;
![]() - ковариационная матрица ошибок фильтрации;
- ковариационная матрица ошибок фильтрации;
![]() - ковариационная матрица ошибок прогноза;
- ковариационная матрица ошибок прогноза;
![]() - матричный коэффициент усиления;
- матричный коэффициент усиления;
![]() - ковариационная матрица шумов измерения;
- ковариационная матрица шумов измерения;
j=x, y, z.
Работа алгоритма основана на анализе величины оцениваемого в фильтре Калмана возмущающего момента [25]. Если математическое ожидание оценки возмущающего момента, вычисленного на некоторой временной базе, где управление равно нулю, превосходит допустимый порог, то принимается решение об отказе ДС и переходе на резерв (рис. 4.7) [25].
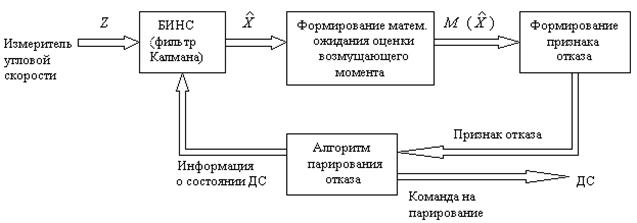
Рис. 4.7 - Обобщенная структурная схема алгоритма
4.6 Метод статистически гипотез
Статистическая гипотеза - есть некоторое предположение относительно
свойств [27, 28] генеральной совокупности, из которой извлекается выборка. Критерий
статистической гипотезы – это правила позволяющие принять или отвергнуть данную
гипотезу на основании выборки. При построении такого правила используются
определенные функции результатов наблюдений ![]() ,
называемые статическими для проверки гипотез. Все возможные значения подобных
статистик делятся на две части: если нет – гипотеза принимается, как не
противоречащая результатам наблюдения, если да – гипотеза отвергается [27, 28,
29]. При этом всегда возможно совершить ошибку; различные типы возможных ошибок
заданы в таблице 4.1:
,
называемые статическими для проверки гипотез. Все возможные значения подобных
статистик делятся на две части: если нет – гипотеза принимается, как не
противоречащая результатам наблюдения, если да – гипотеза отвергается [27, 28,
29]. При этом всегда возможно совершить ошибку; различные типы возможных ошибок
заданы в таблице 4.1:
Страницы: 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24, 25
