

 Реферат: Расчёт поперечно-строгального станка
Реферат: Расчёт поперечно-строгального станка
1.7. Аналитический метод расчёта.
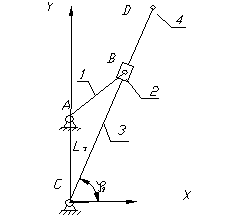 |
Составим уравнение замкнутого векторного контура АВСА
L1+L4=L3 (1)
В проекции на оси неподвижной системы координат X Y:
![]() L1cos(j1)=L3cos(j3)
L1cos(j1)=L3cos(j3)
L1sin(j1)+L4=L3sin(j3) (2)
XL1=L1cos(j1)
YB1=L1sin(j1)+L4
Угол поворота кулисы ВС
j3=Arctg(L1sin(j1)+L4/(L1*cos(j1)) (3)
![]() Положение
камня кулиса 2
Положение
камня кулиса 2
L3=L1 (4)
Координаты точки D:
Xd=Lcd*cos(j1) Yd=Lcdsin(j3) (5)
Угловая скорость кулисы
w3=L1cos(j1-j3)* w1/L3 (6)
Скорости точек звеньев:
Xb1=-L1w1sin(j1) Yb1=L1*w1cos(j1) Vb1=L1*w1. (7)
Xd=-Lcdw3sin(j3) Yd=-Lcdw3cos(j3) (8)
Vb3b1=-L1w1sin(j1-j3) (9)
Xb3=-Lcb3w3sin(j3) Yb3=-Lcb3w3cos(j3) Vb3=Lcb3w3 (10)
Угловое ускорение кулисы
E3=Lb3cw21sin(j1-j3)/L1-2Vb3b2w3/L3 (10)
Ускорение точек звена
Xb1=-L1w21cos(j1), Yb1= -L1w21sin(j1) Ab1=L1*w12. (11)
Xd=-Lcd*E3sin(j3)-Lcdw23cos(j3)
Yd=-Lcd*E3cos(j3)-Lcdw23sin(j3) (12)
![]()
Ad=
Рассмотрим пример
![]() j1=109° j3=Arctg(L1sin(j1)+L4/(L1*cos(j1))=94°,6
j1=109° j3=Arctg(L1sin(j1)+L4/(L1*cos(j1))=94°,6
L3=L1 =0,564 м.
w3=2,198cos(j1-j3)/L3=3,775 1/с
Vb3b1=-2,198sin(j1-j3)=-0,545 м/с
Vd=Lcdw3=0.71w3=2.68 м/с
E3=-34,545sin(j1-j3)+2Vb3b2w3/L3=-7,9
Xd=-0,71*E3sin(j3)-Lcdw23cos(j3)=6,408 м2/с
Yd=0,71*E3cos(j3)-Lcdw23sin(j3)=-9,632 м2/с
![]() Ad= =11,569 м2/с.
Ad= =11,569 м2/с.
Аналогичным образом, пользуясь выражениями (8), (9), (11), (13), (14), (15), найдем значения скоростей и ускорений для всех положений механизма. Результаты представлены в виде таблицы 5.
Табл.5
Ускорения и скорости, вычисленные аналитически.
|
№ пол. |
j1° |
j3° |
L3, м |
w3 1/с |
Vb1b3, м/с |
Vd, м/с |
Ес 1/с2 |
Ad, м/с2 |
|
1 |
199 | 109 | 0,407 | 0 | -2,2 | 0 | -84,88 | 60,26 |
|
2 |
169 | 106 | 0,477 | 2,15 | -1,95 | 1,53 | -46,5 | 33,22 |
|
3 |
139 | 101,4 | 0,532 | 3,27 | -1,34 | 2,33 | -23,07 | 18,07 |
|
4 |
109 | 94,6 | 0,564 | 3,77 | -0,5 | 2,68 | -7,9 | 11,57 |
|
5 |
79 | 87,3 | 0,568 | 3,82 | 0,32 | 2,72 | 4,5 | 10,8 |
|
6 |
49 | 80,2 | 0,543 | 3,46 | 1,14 | 2,46 | 18,47 | 15,63 |
|
7 |
19 | 74,4 | 0,494 | 2,52 | 1,81 | 1,8 | 39,09 | 28,12 |
|
8 |
-11 | 71,1 | 0,426 | 0,7 | 2,18 | 0,5 | 73,15 | 51,94 |
|
8’ |
-19 | 71 | 0,407 | 0 | 2,2 | 0 | 84,87 | 60,26 |
|
9 |
-41 | 72,6 | 0,354 | -2,5 | 2,01 | -1,77 | 117,7 | 83,70 |
|
10 |
-71 | 81,3 | 0,301 | -6,4 | 1,02 | -4,6 | 97,2 | 75,17 |
|
11 |
-101 | 95,2 | 0,294 | -7,8 | -0,61 | -5,1 | -62,8 | 57,68 |
|
12 |
-131 | 105,8 | 0,337 | -3,5 | -1,84 | -2,53 | -124,76 | 89,04 |
2. Силовой расчёт.
2.1. Исходные данные:
Усилие резани Рпс=130 кг.
Веса звеньев G1=10 кг G2=2 кг. G3=16 кг. G4=2 кг. G5= 22 кг.
Угловая скорость кривошипа:
w1=15,7 рад /с.
Длины звеньев:
Lcd=0.71 м. Lас=0,43 м. Lab=0.14 м. Lcs3=0.29 м.
Для 3 положения механизма имеем:
As5=17 м/с.
As3=(Ab3/Lcb3)Lcs3=(12/214)*117=6.6 м/с2.
e3=(Ab3/(Lcb3*mv))=12/(214*0.0025)=22.4 рад/с2.
2.2. Определение сил инерции звеньев.
Из механики известно, что любую систему сил можно привести к главному вектору сил:
Р=ma;
И главному моменту инерции:
Mи=-Ise
Действующих относительно точки приведения, за которую мы принимаем центр масс звеньев.
Определим Ри и Ми для всех звеньев механизма:
Ми5=0 т.к. w=0 Ри5=G5*A5/g=22*17/10=37.4 кг.
Ми4=0 т.к. J4=0 Ри4=G4*A4/g=2*17/10=3.4 кг.
Ми3=J3*E3=0.04*22.4=0.896 рад/с2. Ри3=22,4*0,29*16/10=10 кг.
Ми2=0 т.к. J2=0 Ри2=w21Lab=15.72*0.14=34.5 кг.
Точкой приложения Ри3 служит точка S3. За точку приложения Ри5 условно принимаем середину между опорами Е.
После определения сил инерции звеньев и точек их приложения проводим дальнейшие расчёты для каждой группы отдельно.
2.3. Определение реакций в кинематических парах.
2.3.1. Структурная группа
силовой расчёт начнём с наиболее удалённого звена т.к. все силы действующие на него известны. Действие отброшенных звеньев и реакций опор заменяем силами R0-5 и R3-4. Определим их величины и направления. Масштаб построения выберем mp=1 кгс/мм.
Рассмотрим равновесие звена 5:
ΣРi=0 G5+Pи5+Рпс+ R0-5 + R4-5=0
У реакции и сил, подчеркнутых одной чертой известно направление, двумя чертами величина и направление. Реакция R0-5 – направлена вертикально; R3-4- горизонтально. Построением силового многоугольника определим их величины (действием сил трения пренебрегаем).
Далее рассмотрим равновесие звена 4:
ΣРi=0 R5-4 + Ри4 +G4 + R3-4= 0
R4-5=-R5-4 Построением находим величину и направление R3-4, которая приложена к шарниру. Для нахождения точки приложения R0-5 составим уравнения моментов всех сил, действующих на данную структурную группу относительно точки D.
ΣМd=0
РИ5*h1+R0-5h+Pпс(Pпс –0.01)=0
H=(37.4*18*0.0025+130(18*0.0025-0.01))/22=0.238 м.
2.3.2. Структурная группа
В точке D приложим силу P4-3=-P3-4 . Звенья 1 и 2 соединены вращательной кинематической парой, значит, реакция P1-2 приложена в шарнире В. Звенья 3 и 2 образуют поступательную кинематическую пару, а так как силой трения мы пренебрегаем, то реакция между ними направлена перпендикулярна CD.
Рассмотрим равновесие кулисы (звена 3).
Составим уравнение моментов относительно точки С:
ΣМс=0 R4-3 h3 +PИ3 h3 +G3 h3 +Mи-P2-3h=0
R2-3=(170*150+10*0.6+16*9+0.896)/113=227 кг.
Для определения реакции Rс-3 составим уравнение суммы всех сил действующих на звено 3. Точка приложения силы – шарнир С
ΣFi=0 R4-3 +RИ3 +G3 +R2-3 +Rс-3=0
Для определения её величины и направления строим силовой многоугольник
Страницы: 1, 2, 3, 4, 5, 6, 7, 8
