

 Курсовая работа: Разработка математической модели теплообменника смешения
Курсовая работа: Разработка математической модели теплообменника смешения
по каналу ![]()
 (2.5)
(2.5)
3. Получение математической модели объекта в виде переменных пространство состояний
Одной из распространенных форм математического описания линейных динамических систем являются уравнения следующего вида:
 ;
;  (3.1)
(3.1)
Это название связано с тем, что при uk = 0 достаточно задать начальное значение переменных xi, чтобы однозначно определить состояние системы xi(t), y1 для любого момента времени. Модель (3.1) содержит n дифференциальных уравнений 1-го порядка с k управляющими входными воздействиями, а также s алгебраических соотношений для связи выходных переменных системы y с переменными состояния x. Коэффициенты aij, bik, cli называют параметрами модели.
Уравнения (3.1) удобно представить в матричной форме
![]() (3.2)
(3.2)
где X - вектор переменных состояния; U − вектор управляющих (входных) воздействий; Y - вектор выходов; A, B, C − матрицы параметров [2].
Модель (3.2), в сравнении с ранее рассмотренными моделями, формирует дополнительно n переменных внутреннего состояния системы, что увеличивает количество информации об объекте управления.
При этом начальные условия согласуют следующим образом:
 (3.7)
(3.7)
Структурная схема объекта с учетом полученных передаточных функций:
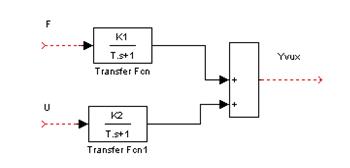
Рисунок 3.1-Структурная схема объекта
Тогда вектор переменных состояния объекта в отклонениях от желаемых базовых значений примет вид:
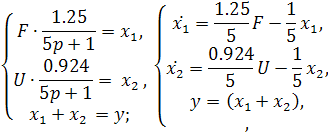
На основе полученных дифференциальных уравнений запишем матрицы А, B и S.
4. Получение дискретной математической модели объекта
Термин “дискретный” еще не сложился. Каждая система управления, в которой присутствует хотя бы один элемент, который не подчиняется непрерывному характеру изменения сигнала, может быть отнесен к классу дискретных систем. Для этих систем характерным является исчезновения сигнала информации хотя бы на небольшом интервале времени. Если эти интервалы устремить к нулю, то можно рассматривать систему как непрерывную. Дискретные системы более общие. В производстве часто технологические процессы непрерывные [2].
Пусть имеется на входе в дискретный элемент какой-то непрерывный сигнал.
Введем период квантования. Заменяем реальное время на кванты т=к*Т к=0,1,…,![]() . Если Т
. Если Т![]() 0 тогда имеем непрерывную
модель. В этом случае можно зафиксировать амплитуды. Кроме квантования по
времени можно квантовать и по вертикали (амплитуде). При таком виде квантования
цифры заносятся в виде “0” и “1”. В случае объединения этих квантований они
называются дискретными.
0 тогда имеем непрерывную
модель. В этом случае можно зафиксировать амплитуды. Кроме квантования по
времени можно квантовать и по вертикали (амплитуде). При таком виде квантования
цифры заносятся в виде “0” и “1”. В случае объединения этих квантований они
называются дискретными.
Выделим случай, когда входной сигнал x(t) является элементарной функцией 1(t). Реакцию системы на воздействие 1(t) можно компактно:
 ,
(5.1)
,
(5.1)
где W(D) называется операторной передаточной функцией или оператором. Формально W(D) можно рассматривать как дробно-рациональную функцию от оператора:
 .
(5.2)
.
(5.2)
Воспользуемся преобразованием Лапласа, основываясь на утверждении
![]() ,
(5.3)
,
(5.3)
если f(0) = 0. Аналогично можно записать:
![]()
![]() (5.4)
(5.4)
![]() (5.5)
(5.5)
для любого операторного многочлена степени k, если f(t) и ее производные при t < 0, равны нулю.
Применяя правило (5.5), получим
![]() ,
(5.6)
,
(5.6)
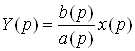
где ![]()
При этом предполагается, что равны нулю y(0), x(0) и начальные значения производных y(t), x(t) вплоть до (n – 1)-й и (m – 1)-й соответственно. Теперь a(p), b(p) - обычные функции комплексной переменной p. Поэтому операция деления на a(p) имеет обычный смысл
 .
(5.7)
.
(5.7)
Учитывая определения (5.7), приходим к основной формуле
![]() .
(5.8)
.
(5.8)
Для осуществления z-преобразования и выбора периода квантования воспользуемся пакетом Matlab:
clc, clear
%Передаточная функция по 1-ому динамическому каналу
W1=tf([1.25],[5 1]);
%Передаточная функция по 2-ому динамическому каналу
W2=tf([0.924],[5 1])
%Формирование передаточной объекта
Wo=series(W1,W2)
T=0.5;
WWo=c2d(Wo,T,'zoh')
figure(1);
step(Wo,WWo)
grid on
Определяем погрешность квантования:
![]()
Погрешность квантования не превышает заданную (7%), значит выполняем переход от непрерывной модели к дискретной с периодом квантования 0.5.
Передаточная функция в z-области:
![]()
Программа перехода от непрерывной модели(модели в пространстве состояния ) к дискретной в пакете MATLAB
clc, clear
% задаем матрицы параметров
A=[-0.2 0;0 -0.2]
B=[0;0.1848]
F=[0.25;0]
C=[1 1]
D=[0]
BB=[B F]
% переход в область переменных состояний
sistema1=ss(A,BB,C,D)
% переход в дискретную область
sistema2=c2d(sistema1,0.5)
Wz=tf(sistema2)
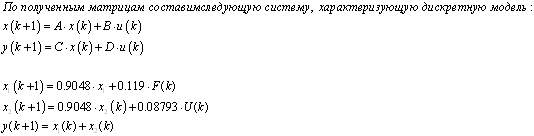
Модель в пространстве состояний.
a = x1 x2 x1 0.9048 0 x2 0 0.9048 b = u1 u2 x1 0 0.119 x2 0.08793 0
c = x1 x2 y1 1 1 d = u1 u2 y1 0
Передаточная функция в z-области по каналам.
1.По первому динамическому каналу.
![]()
5. Получение переходных функций объекта по передаточным функциям каналов
Переходной характеристикой(переходной функцией) h(t) называется реакция системы на единичное ступенчатое входное воздействие u(t-τ)=1(t-τ) при нулевых начальных условиях. Единичная ступенчатая функция – это функция, которая обладает свойством
![]()
На рисунке 5.1 приведен пример переходной характеристики системы.
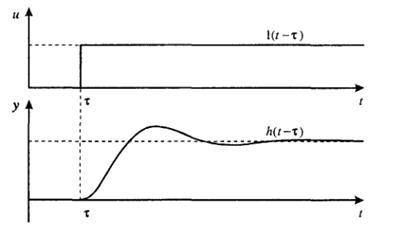
Рисунок 5.1-Пример переходной характеристики системы (τ – момент возникновения входного воздействия)
Для аналитического определения переходной функции следует решить дифференциальное уравнение при нулевых начальных условиях и единичном входном воздействии. При исследовании реального объекта переходную характеристику можно получить экспериментальным путем, подавая на его вход ступенчатое воздействие и фиксируя реакцию на выходе. Если входное воздействие представляет собой неединичную ступенчатую функцию u(t)=k1(t), то выходная величина будет равна y(t)=kh(t), т.е. представляет собой переходную характеристику с коэффициентом пропорциональности k[2].
Для построения переходной характеристики воспользуемся пакетом
Matlab:
clear,clc
W1=tf([1.25],[0.05 1]);
step(W)
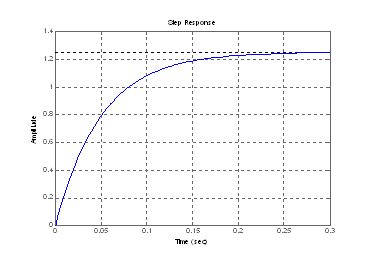
Рисунок 5.1- Переходная характеристика объекта по первому динамическому каналу
6. Расчет коэффициентов передаточной функции по экспериментальной переходной функции методом площадей
Сравнение результатов расчета с истинной (аналитической) передаточной функцией объекта.
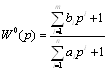
В основе метода площадей лежит предположение, что объект может быть описан линейным дифференциальным уравнением с постоянными коэффициентами, а его нормированная (приведенная к единице) переходная характеристика может быть аппроксимирована передаточной функцией вида:
 (6.1)
(6.1)
Порядок числителя в выражении (6.1) всегда меньше или равен порядку знаменателя. Для нахождения явного вида выражения (6.1) для конкретного технологического объекта необходимо определить значения коэффициентов ai и bi, а также значения степеней полиномов n и m.
На первом этапе осуществляют нормирование переходной характеристики и входного воздействия:
![]() ;
;
![]() (6.2)
(6.2)
Искомые коэффициенты W0(p) определяются из системы уравнений:
