

 Реферат: АСУ двухстадийного дробления замкнутого цикла
Реферат: АСУ двухстадийного дробления замкнутого цикла
![]()
S2 = 1,
S1 = 1.6453,
S0 =0.0211.
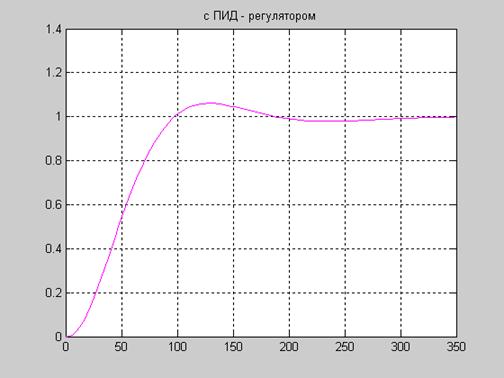
Рис. 5.3. Переходный процесс системы с ПИД – регулятором.
Из переходных процессов видно, что наиболее оптимальным является ПИД – регулятор, т. к. у него меньше перерегулирование и меньше время переходного процесса.
 6. Подключение датчиков к контроллеру
6. Подключение датчиков к контроллеру
Устройство управления для данной системы реализуем на базе контроллера ROBO 3140, на который в этом случае возлагаются функции сбора информации о текущей производительности подсистем дозирования, обработки полученной информации и выдачи управляющих сигналов на исполнительные механизмы. Характеристики контроллера приведены в таблице 1.
Таблица 1. ROBO 3140
| Конструкция | Пластиковый корпус | |
| Вид монтажа | Монтаж на DIN рейку; Монтаж на стене | |
| Процессор | ||
| Тип процессора | AMD188ES | |
| Максимальная частота процессора | 40МГц | |
| Память | ||
| Оперативная память | Максимальный объем | 256кб |
| Установлено | 256кб | |
| Энергонезависимая память | Максимальный объем | 2кб |
| Установлено | 2 | |
| Тип | EEPROM | |
| Электронный диск | Установлено | 512кб |
| Максимальный объем | 512кб | |
| Тип | Flash | |
| Интерфейс | ||
| Последовательный интерфейс | Тип | 2xRS232; RS485; RS232/RS485 |
| Максимальная скорость | 115200бит/сек | |
| Разъемы | DB9; Винтовые клеммы | |
| Таймеры | ||
| Часы реального времени | Да | |
| Сторожевой таймер | 1.6сек | |
| Разъемы | ||
| Разъемы | Питания | Винтовые клеммы |
| Другие | DB9 Винтовые клеммы | |
| Управление и индикация | ||
| Индикаторы | Светодиоды | |
| Питание | ||
| Напряжение питания | +10...+30В | |
| Потребляемая мощность | 3Вт | |
| Программное обеспечение | ||
| Программное обеспечение | Операционная система | DOS |
| Системное | Библиотека программирования | |
| Инструментальная система | GoodHelp | |
| Условия эксплуатации | ||
| Условия эксплуатации | Температура | -20..+75°С |
| Размеры и вес | ||
| Размеры | Ширина | 72мм |
| Высота | 122мм | |
| Глубина | 25мм | |
| Вес | 0.2кг | |
Для ввода информации в контроллер, учитывая, что выходной сигнал с датчиков производительности подсистем дозирования является аналоговым и изменяется в пределах 0..5 мА, выбираем модуль I-7012 (по одному на каждый контур дозирования), характеристики которого представлены в таблице 2. В этом случае подключение осуществляется через внешний резистор 125 Ом.
Таблица 2. Модуль I-7012
| Конструкция | Модуль с последовательным интерфейсом; Монтаж на DIN рейку; Пластиковый корпус | |
| Интерфейс | ||
| Интерфейс | Тип | RS-485 |
| Скорость передачи данных | 1200бит/сек; 2400бит/сек; 4800бит/сек; 9600бит/сек; 19200бит/сек; 38400бит/сек; 57600бит/сек; 115200бит/сек | |
|
|
1200м (Сегмент) | |
| Протокол передачи данных | Совместим с протоколом ADAM-4000 | |
| Макс. количество модулей в сети | 2048 | |
| Аналоговый ввод | ||
| Каналов аналогового ввода | Всего | 1 |
| Дифференциальных | 1 | |
| Диапазоны входного сигнала | Биполярного, по напряжению | -0.15..+0.15В; -0.5..+0.5В; -1..+1В; -5..+5В; -10..+10В |
| Биполярного, по току | -20..+20мА | |
| Входное сопротивление | При измерении напряжения | 20МОм |
| При измерении тока | 150Ом (Внешний резистор) | |
| Вход | Токовый шунт | Внешний; 150 Ом |
| Перегрузка по входу | 35В | |
| Полоса пропускания | 5.24Гц | |
| АЦП | Разрядность | 24бит |
| Частота выборки | 10выборок/сек | |
| Тип преобразования | Сигма-дельта преобразование | |
| Режимы запуска | Встроенный генератор | |
| Гальваническая изоляция | 3000В | |
| Погрешность | -0.05..+0.05% | |
| Коэффициент подавления помехи общего вида | 86дБ (50/60Гц) | |
| Коэффициент подавления помехи нормального вида | 100дБ (50/60Гц) | |
| Температурный дрейф нуля | 20мкВ/°C | |
| Дискретный ввод | ||
| Каналов дискретного ввода | Всего | 1 |
| Без изоляции | 1 | |
| Входное напряжение | Логический 0 | 0..+1В |
| Логическая 1 | +3.5..+30В | |
| Дискретный вывод | ||
|
Каналов |
Всего | 2 |
| Открытый коллектор, без изоляции | 2 | |
| Коммутируемый ток | Постоянный | 30мА |
| Коммутируемое напряжение | Постоянное | 30В |
| Рассеиваемая мощность | 300мВт | |
| Таймеры/счетчики | ||
| Таймеры/счетчики | Всего | 1 (Счетчик событий) |
| Входная частота | Измерение частоты | 0..50Гц |
| Процессор | ||
| Встроенный процессор | Совместим с 8051 | |
| Сторожевой таймер | ||
| Сторожевой таймер | Да | |
| Разъемы | ||
| Разъемы | Винтовые клеммы | |
| Питание | ||
| Напряжение питания | +10...+30В | |
| Потребляемая мощность | 1.3Вт | |
| Условия эксплуатации | ||
| Условия эксплуатации | Температура | -20..+75°С |
| Размеры, вес | ||
| Размеры | Длина | 122мм |
| Ширина | 72мм | |
| Высота | 25мм | |
 Максимальная длина линии связи
Максимальная длина линии связи дискретного вывода
дискретного выводаВ качестве исполнительного механизма в данном случае используются АД, управление которым осуществляется посредством АИН который в свою очередь управляется ШИМ через специальную микросхему драйвер IR2235S. В соответствии с этим выбран модуль I-7066, характеристики которого приведены в таблице 3.
Таблица 3. Модуль I-7066
| Интерфейс | ||
| Интерфейс | Тип | RS-485 |
| Скорость передачи данных |
1200бит/сек; 2400бит/сек; 4800бит/сек; |
|
| Максимальная длина линии связи | 1200м (Сегмент) | |
| Протокол передачи данных | Совместим с протоколом ADAM-4000 | |
| Макс. количество модулей в сети | 2048 | |
| Дискретный вывод | ||
| Каналов дискретного вывода | Всего | 7 |
| Твердотельное реле (SSD) | 7 | |
| Гальваническая изоляция | 5000В | |
| Реле | Максимальный коммутируемый ток, постоянный | 0.13А@350В |
| Максимальный коммутируемый ток, переменный | 0.13А@350В | |
| Время включения | 0.7мс | |
| Время выключения | 0.05мс | |
| Процессор | ||
| Встроенный процессор | Совместим с 8051 | |
| Сторожевой таймер | ||
| Сторожевой таймер | Да | |
| Разъемы | ||
| Разъемы | Винтовые клеммы | |
| Питание | ||
| Напряжение питания | +10...+30В | |
| Потребляемая мощность | 0.5Вт | |
| Условия эксплуатации | ||
| Условия эксплуатации | Температура | -20..+75°С |
| Размеры, вес | ||
| Размеры | Длина | 122мм |
| Ширина | 72мм | |
| Высота | 25мм | |
 9600бит/сек;
19200бит/сек; 38400бит/сек; 57600бит/сек; 115200бит/сек
9600бит/сек;
19200бит/сек; 38400бит/сек; 57600бит/сек; 115200бит/сек Таким образом, функциональная схема
устройства управления будет иметь вид, представленный на рис. 6.1.
Таким образом, функциональная схема
устройства управления будет иметь вид, представленный на рис. 6.1.
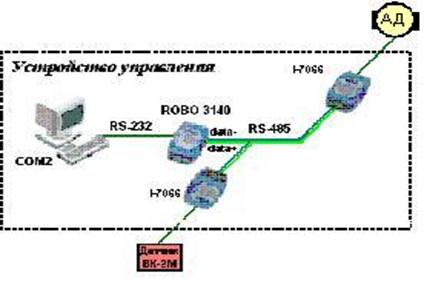
Рис. 6.1. Функциональная схема устройства управления.
Электрическая схема подключения датчика ВК-2М к модулю I-7012 представлена на рис. 6.2.
Рис. 6.2. Схема подключения датчика производительности к модулю I-7012.
Электрическая схема подключения привода питателя к модулю I-7066 представлена на рис. 6.3
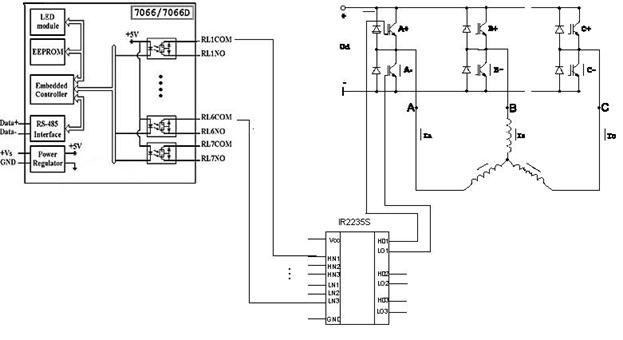
Рис. 6.3. Схема подключения модуля I-7066 к АД.
 7. Реализация САР в GOOD HELP
7. Реализация САР в GOOD HELP
Устройство управления системой реализуем на базе контроллера ROBO 3140 с помощью системы графического программирования контроллеров Good Help, которая представляет собой поддержку языка функциональных блоковых диаграмм – FBD (Function Block Diagrams).
Графический язык диаграмм функциональных блоков (далее FBD) позволяет технологу строить сложные схемы на основе существующих функций библиотеки системы Good Help, связанных в диаграмму.
Диаграмма FBD описывает функцию, определяющую взаимодействие между входами и выходами блоков, имеющихся в библиотеке.
Элементарный блок выполняет одну функцию взаимодействия между своими входами и выходами. Схема разрабатывается путем размещения функциональных блоков на различных вкладках поля редактирования, которые позволяют создавать логическое разбиение контуров редактирования по группам.
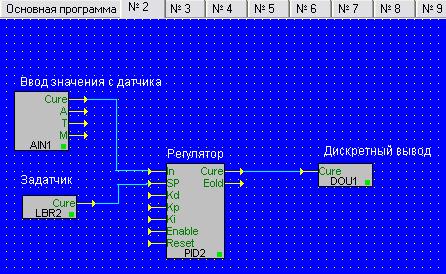
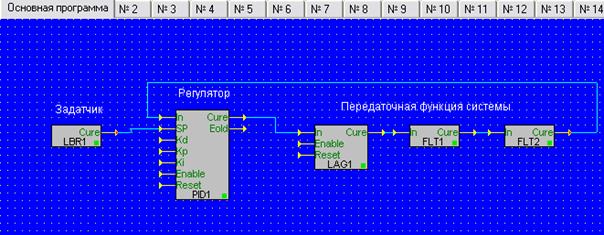
Для реализации полученного оптимального закона регулирования необходимо в редакторе схем (edchart) с помощью стандартных блоков набрать соответствующую программу.
 Программа
регулирования производительности щековой дробилки
Программа
регулирования производительности щековой дробилки
Для проверки системы отображения информации на пульте оператора можно создать тестовую схему, описывающую математическую модель объекта управления.
Программа регулирования производительности щековой дробилки в тестовом режиме.
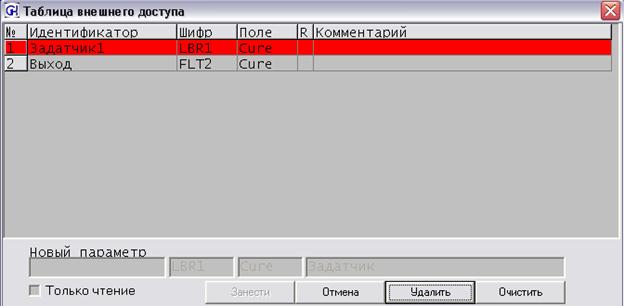
Регулируемые параметры, а также параметры, несущие важную информацию о ходе технологического процесса, необходимо занести в таблицу внешнего доступа, чтобы они были доступны оператору.
В данном случае таблица внешнего доступа имеет вид:
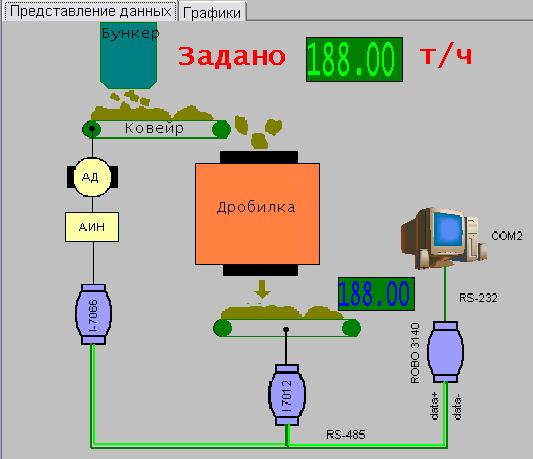
Для удобного контроля и управления технологическим процессом воспользуемся редактором отображения информации (wstation). Он предназначен для представления данных, полученных от технологических контроллеров, на графических мнемосхемах.
В окне редактирования на поверхности статической мнемосхемы (иначе ее можно назвать подложка или фон) производится расстановка форм отображения информации и привязка к этим формам параметров, получаемых от контроллеров.
В данном случае нам необходимо обеспечить отображение производительности дробилки, а также заданную производительность дробилки с возможностью ее изменения.
Окно регулирования загрузки мельницы (рис. 7.1) содержит в качестве подложки функциональную схему процесса, а также две формы типа динамический текст для отображения производительности. Эти формы предназначены для отображения и ввода информации. Это свойство можно использовать для обеспечения возможности оператору задавать требуемую производительность мельницы.
|
Окно переходных процессов (рис. 7.2) носит вспомогательный характер и отражает динамику процесса регулирования производительности дробилки.
|

 Заключение
Заключение
В данном курсовом проекте была произведена автоматизация щековой дробилки, для которой производительность на выходе зависит от производительности питателя. Для того чтобы система обладала быстродействием и не была при этом расходящаяся, был выбран и рассчитан регулятор. Наилучшими свойствами указанными выше при расчете регулятора обладает ПИД-регулятор.
Данную систему реализовали в GOOD HELP для реального объекта с использование модулей I -7000, ROBO-3140 и стандартных компонент. А также создали тестовый вариант программы для наглядной демонстрации.
 Список литературы
Список литературы
1. Зеличенок Г. Г. Автоматизация технологических процессов на предприятии строительной индустрии – М.: “ Машиностроение ”1974г.
2. Проектирование цементных заводов. Под редакцией Зозулина П.В., Никифорова Ю. В. – М.: “Машиностроение”, 1995г.
3. Банит Ф. Г., Несвижский О.А. Механическое оборудование цементных заводов – М.: “ Машиностроение ”,1975г.
4. www.icp2u.ru
5. www.metran.ru
6. http://upk.ural.ru/index/ru/products/17
