

 Реферат: Средства визуализации изображений в компьютерной томографии и цифровых рентгенографических системах
Реферат: Средства визуализации изображений в компьютерной томографии и цифровых рентгенографических системах
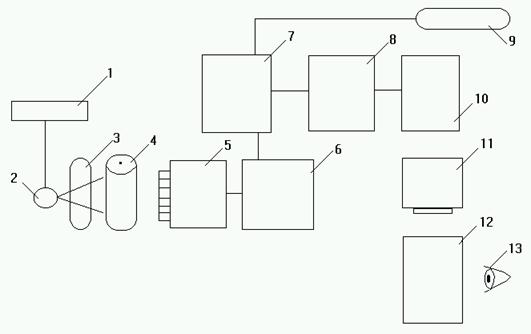
Рис.5 Цифровая селеновая рентгенография.
1-генератор; 2-рентгеновская трубка; 3-пациент; 4-селеновый барабан;
5-сканирующие электроды+усилитель; 6-аналого-цифровой преобразо-
ватель; 7-накопитель изображений; 8-видеопроцессор; 9-сеть;
10-цифро-аналоговый преобразователь; 11-монитор; 12-снимок;
13-рентгенолог.
4. Математические основы компьютерной томографии
Исследования внутренней структуры объектов с помощью рентгеновского излучения широко распространены и хорошо известны. Ослабление рентгеновского излучения вдоль луча, соединяющего источник и приемник, является интегральной характеристикой плотности исследуемого объекта. С математической точки зрения речь идет о задаче восстановления функции по ее интегральным значениям вдоль некоторого семейства лучей. Различные лучи соответствуют различным (относительно объекта) положениям источника и приемника излучения. Такая модель является простейшей, но во многих случаях хорошо отражает реальную ситуацию и подтверждается исследованиям реальных тестовых объектов. Плотность реальных объектов является функцией трех пространственных координат. Однако в классической компьютерной томографии трехмерный объект представляют в виде набора тонких срезов. Внутри каждого среза плотность считают функцией только двух переменных. При исследовании фиксированного среза систему источник-приемник устраивают таким образом, что регистрируются данные только по лучам, лежащим в тонком слое относительно центральной плоскости среза. Таким образом приходят к задаче восстановления функции двух переменных по ее интегральным значениям вдоль некоторого семейства лучей Для регистрации в веерной схеме, чаще встречающейся в реальных томографах, используется линейка детекторов, различные положения источника относительно объекта обеспечиваются вращением системы регистрации или объекта.
4.1. Математическая постановка задачи рентгеновской компьютерной томографии, преобразование Радона и формулы обращения.
В компьютерной рентгеновской томографии
трехмерный объект представляется обычно в виде набора тонких срезов. Для
восстановления плотности среза решается задача обращения двумерного преобразования
Радона. Преобразованием Радона функции f(x,
y)
называется функция, ![]() определяемая равенством
определяемая равенством ![]() .
.
Обычно для восстановления функции двух переменных по ее интегралам вдоль прямых используется метод свертки и обратного проецирования. В этом методе формула обращения преобразования Радона записывается без явного использования обобщенных функций. Однако наиболее общий и естественный вид формулы обращения преобразования Радона приобретают при использовании аппарата обобщенных функций. Далее будет рассмотрено соотношение между методом обобщенных функций и методом свертки и обратного проецирования.
Перед изложением собственно численного алгоритма будет дан вывод формулы обращения, позволяющий естественным образом перейти к построению алгоритма.
В силу равенства
![]()
функция ![]() при любом фиксированном p определяется своими значениями при
при любом фиксированном p определяется своими значениями при ![]() . Это позволяет нам
перейти к функции
. Это позволяет нам
перейти к функции
![]() .
.
Здесь L(r,
φ) - прямая, ортогональная лучу, имеющему угол φ ρ положительным
направлением оси X, и отстоящая от начала координат на расстояние r (r![]() 0), при r < 0 L(r,
φ) - прямая, симметричная относительно начала координат прямой L(|r|, φ). Выразим f(x, y)
через I(r, φ).
0), при r < 0 L(r,
φ) - прямая, симметричная относительно начала координат прямой L(|r|, φ). Выразим f(x, y)
через I(r, φ).
Поскольку
 ,
,
где ![]() - преобразование Фурье функции f, то, переходя к полярным координатам после элементарных
преобразований интеграла по φ на интервале [π, 2π],
οолучаем
- преобразование Фурье функции f, то, переходя к полярным координатам после элементарных
преобразований интеграла по φ на интервале [π, 2π],
οолучаем
 .
.
Введем функцию S(z, φ), полагая
 .
.
При фиксированном φ функция S(z, φ) εсть обратное одномерное
преобразование Фурье от произведения ![]() и |r|.
Для
и |r|.
Для ![]() справедливо
равенство
справедливо
равенство
 .
.
Обратное преобразование Фурье от |r| есть обобщенная функция v1/πz2. Переходя от преобразования Фурье
произведения к свертке, получаем S(z,φ) = I(z,φ)![]() (v1/πz2). Используя регуляризацию функции 1/z2 [19] приходим к выражению
(v1/πz2). Используя регуляризацию функции 1/z2 [19] приходим к выражению
 . (1.5.1)
. (1.5.1)
Таким образом, для f(x, y) справедлива формула
 , (1.5.2)
, (1.5.2)
позволяющая выразить искомую функцию через наблюдаемые данные.
Прежде чем перейти к дискретному варианту сделаем ряд замечаний, связанных с обоснованием корректности рассматриваемых алгоритмов в реальных ситуациях. Обобщенные функции являются функционалами над пространством бесконечно дифференцируемых быстро убывающих функций. Однако при построении аппроксимаций исходных реальных данных по отсчетам, заданным в дискретных точках, желательно иметь менее жесткие требования к гладкости аппроксимирующих функций. Свертка с обобщенными функциями, в частности, с функцией 1/z2, может быть определена для значительно менее гладких функций, это очень важно при доказательстве корректности применения численных алгоритмов, получаемых с помощью аппарата обобщенных функций, к реальным данным.
Перейдем к дискретному варианту. Будем предполагать, что f(x, y) = 0 вне круга радиуса R с центром в нуле. Исходными данными являются величины I(ri, φi), здесь ri v отсчеты в интервале [-R, R], 1 ≤ i ≤ M - отсчеты в интервал [0, π], 1 ≤ j ≤ N. Если теперь при заданных значениях функции I(r, φ) β отсчетах (ri, φi) построить аппроксимацию I(r, φ) так, что для S(z,φ) βыполняется равенство (1.5.1), то используя (1.5.1) и (1.5.2) можно получить приближение к f(x, y). В дальнейшем будем предполагать, что отсчеты на осях r и φ являются равноотстоящими.
При каждом фиксированном φj определим ![]() следующим образом.
следующим образом.
1.
Функция
![]() имеет
непрерывную первую производную по r.
имеет
непрерывную первую производную по r.
2.
В
узлах решетки аппроксимирующая функция совпадает с заданными отсчетами, а ее
производная в этих точках равна выборочной. То есть справедливы равенства: ![]() ,
, ![]() , здесь h = 2R/(M-1), I(r0,φj) = I(rM+1, φj) = 0, i
= 1, -, M.
, здесь h = 2R/(M-1), I(r0,φj) = I(rM+1, φj) = 0, i
= 1, -, M.
3.
На
интервале [ri, ri+1] функция ![]() есть полином
третьей степени от r.
есть полином
третьей степени от r.
Перечисленные условия позволяют в явном виде получить коэффициенты соответствующего сплайна. Непосредственными вычислениями можно получить, что
 ,
,
где

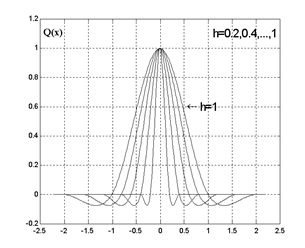
Q(x) = Q(-x), Q(x) = 0 при |x|> 2h, h=ri+1-ri.
Функция Q(x) имеет разрывы второй производной, но модуль второй
производной интегрируем, используя это обстоятельство можно показать, что
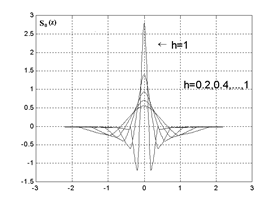
свертка S0(z) = Q(x) ![]() (-1/πz2) выражается формулой (1.5.1).
Непосредственными вычислениями получаем
(-1/πz2) выражается формулой (1.5.1).
Непосредственными вычислениями получаем

Графики функций Q(x) и S0(z) для различных значений h представлены на рис. 1 и рис. 2.
Таким образом,
 .
.
Заменяя в
(1.5.2) S на ![]() и интеграл частной суммой, получаем
f*(x, y) - приближение
к функции f(x, y),
и интеграл частной суммой, получаем
f*(x, y) - приближение
к функции f(x, y),
 . (1.5.3)
. (1.5.3)
Как уже отмечалось выше, обычно в компьютерной томографии используется метод свертки и обратного проецирования. Рассмотрим соотношение между этим методом и методом, изложенным в настоящем параграфе. Используя интегрирование по частям, свертку с обобщенной функцией 1/z2 можно заменить дифференцированием и сверткой с 1/z (преобразованием Гильберта).
То есть функцию
S(z, φ) = I(z, φ) ![]() 1/z2
1/z2
можно представить в виде
S(z, φ) = Iz/(z, φ) ![]() 1/z
1/z
При построении численных алгоритмов вместо обобщенной функции 1/z или, что то же самое, интеграла в смысле главного значения, в методе свертки и обратного проецирования используют некоторую последовательность регулярных функций pА(z), сходящуюся к 1/z (в смысле обобщенных функций) при A стремящемся к бесконечности. Используя интегрирование по частям, дифференцирование переносят на функции pА(z) и таким образом получают регулярные функции, сходящиеся к 1/z2, то есть свертка с обобщенной функцией 1/z2 заменяется последовательностью сверток с регулярными функциями p/А(z).
Страницы: 1, 2, 3, 4, 5, 6, 7, 8, 9, 10
