

 Курсовая работа: Решение задач линейной оптимизации симплекс – методом
Курсовая работа: Решение задач линейной оптимизации симплекс – методом
Крекинг-бензина ![]() тыс.л.
тыс.л.
Бензина прямой перегонки ![]() тыс.л.
тыс.л.
Изопентона ![]() тыс.л.
тыс.л.
5. Формирование М-задачи
Далеко не всегда имеет смысл разделять решение задачи линейного программирования на два этапа – вычисление начального опорного плана и определение оптимального плана. Вместо этого решается расширенная задача (М-задача). Она имеет другие опорные планы (один из них всегда легко указать), но те же решения (оптимальные планы), что и исходная задача.
Рассмотрим наряду с исходной задачей (2.1) - (2.3) в канонической форме следующую расширенную задачу (М-задачу):
![]() (5.1)
(5.1)
![]() (5.2)
(5.2)
![]() . (5.3)
. (5.3)
Здесь М>0 – достаточно большое число.
Начальный опорный план задачи (5.1) - (5.3) имеет вид
![]()
Переменные ![]() называются
искусственными переменными.
называются
искусственными переменными.
Таким образом, исходная задача линейного программирования с неизвестным заранее начальным опорным планом сводится к М-задаче, начальный опорный план которой известен. В процессе решения этой расширенной задачи можно либо вычислить оптимальный план задачи (2.1) - (2.3), либо убедиться в ее неразрешимости, если оказывается неразрешимой М-задача.
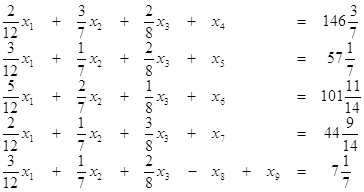
В соответствии с вышеизложенным имеем: требуется решить задачу (2.12), (2.13), записанную в канонической форме. Введем искусственную неотрицательную переменную х9 и рассмотрим расширенную М-задачу
![]() (5.4)
(5.4)
при условиях
 (5.5)
(5.5)
![]() ,
где
,
где ![]() .
.
где М – сколь угодно большая положительная величина.
Как и в L-задаче, добавление только одной искусственной
переменной ![]() (вместо пяти) обусловлено тем,
что исходная задача уже содержит четыре единичных вектора условий А4, А5,
А6, А7.
(вместо пяти) обусловлено тем,
что исходная задача уже содержит четыре единичных вектора условий А4, А5,
А6, А7.
6. Решение М-задачи II алгоритмом симплекс-метода
Описание II алгоритма
Второй алгоритм (или метод обратной матрицы) симплекс
метода основан на ином способе вычисления оценок ![]() векторов
условий Аj, чем в первом алгоритме.
векторов
условий Аj, чем в первом алгоритме.
Рассматривается задача линейного программирования в
канонической форме (2.1) - (2.3). Пусть Х – опорный план с базисом ![]() .
Все параметры, необходимые для оценки плана на оптимальность и перехода к
лучшему плану, можно получить, преобразовывая от шага к шагу элементы матрицы
.
Все параметры, необходимые для оценки плана на оптимальность и перехода к
лучшему плану, можно получить, преобразовывая от шага к шагу элементы матрицы ![]() .
.
Действительно, зная обратную матрицу ![]() , можно получить базисные
составляющие опорного плана:
, можно получить базисные
составляющие опорного плана:
![]()
и вычислить оценки векторов условий относительно текущего базиса
![]() , (6.1)
, (6.1)
предварительно определив вектор-строку ![]() по формуле
по формуле
![]()
или
![]() . (6.2)
. (6.2)
Здесь ![]() -
вектор-строка из коэффициентов линейной формы, отвечающих базисным переменным.
-
вектор-строка из коэффициентов линейной формы, отвечающих базисным переменным.
Оценки ![]() позволяют
установить оптимальность рассматриваемого опорного плана и определить вектор Ак,
вводимый в базис. Коэффициенты
позволяют
установить оптимальность рассматриваемого опорного плана и определить вектор Ак,
вводимый в базис. Коэффициенты ![]() разложения
вектора Ак по текущему базису вычисляются по формуле
разложения
вектора Ак по текущему базису вычисляются по формуле
![]() .
.
Как и в I алгоритме, вектор, подлежащий исключению из базиса, определяется величиной
 .
.
Таким образом при втором алгоритме на каждом шаге
запоминаются базисные компоненты ![]() , обратная
матрица
, обратная
матрица ![]() , значение линейной формы F(X) и
вектор Y, соответствующие текущему опорному плану Х. Элементы
столбцов матрицы
, значение линейной формы F(X) и
вектор Y, соответствующие текущему опорному плану Х. Элементы
столбцов матрицы ![]() удобно
рассматривать как коэффициенты
удобно
рассматривать как коэффициенты ![]() разложения
единичных векторов
разложения
единичных векторов ![]() по векторам
базиса. Рекуррентные формулы, связывающие параметры двух последовательных
итераций
по векторам
базиса. Рекуррентные формулы, связывающие параметры двух последовательных
итераций
![]() ; (6.3)
; (6.3)
![]() . (6.3)
. (6.3)
Здесь
![]() .
.
Результаты вычислений сводятся в основные таблицы (вида табл. 6.1) и вспомогательную таблицу (вида табл. 6.2); столбцы В, е1, …, еm основных таблиц (все m+1 позиций) называют главной частью этих таблиц. Столбец Аk – разрешающий столбец, строка l – разрешающая строка.
Таблица 6.1 Таблица 6.2
| N |
|
|
B |
|
… |
|
|
t | N | B |
|
|
… |
|
|
| 1 |
|
|
|
|
… |
|
|
1 |
|
|
|
… |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| l |
|
|
|
|
… |
|
|
|
m |
|
|
|
… |
|
|
|
|
|
|
|
|
|
|
|
|
m+1 | C |
|
|
… |
|
|
| M |
|
|
|
|
… |
|
|
0 |
|
|
|
… |
|
||
| m+1 | – | – |
|
|
… |
|
|
– | 1 |
|
|
|
… |
|
|
| 2 |
|
|
|
… |
|
||||||||||
| … | … | … | … | … | … |
