

 Курсовая работа: Нелинейные САУ
Курсовая работа: Нелинейные САУ
![]()
![]()
![]() >
>
![]()
![]() 0
0
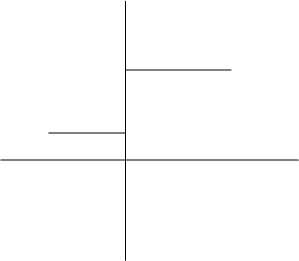
“а” “б”
 |
 |
“в” “г”
Рисунок 4.
В рассматриваемом случае (10) при
W![]() (p)=
(p)=![]() , когда
, когда
W(p)= W![]() (p)G(p),
G(p)=
(p)G(p),
G(p)=![]() p+1,
p+1,
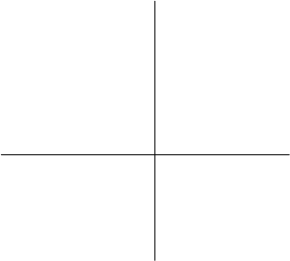
годограф W(jw) системы на рис. 5.
![]() j
j
W(jw)
w=¥
![]()
![]() >
>![]()
![]() <
<![]()
![]() =
=![]()
w=0
Рисунок 5.
В случае (10) справедливы графические формы на рис. 4 в,г, т.е. исследуемая система абсолютно устойчива в смысле кругового критерия (3) или (5) при
![]() >
>![]() (14)
(14)
Интересно заметить, что достаточные условия абсолютной устойчивости по Ляпунову
а > 0 , y(t) > 0
и
a > c
для рассматриваемого случая совпадают с достаточными условиями абсолютной устойчивости, полученными для кругового критерия (14), если выполняется требование
y(t) > 0 (15)
поскольку, согласно (11) и (13) a=a![]() =
=![]() .
.
Докажем это, используя условия существования скользящего режима
-![]() k£y(t)=c
k£y(t)=c![]()
![]() k
k
т.е. подставим сюда вместо коэфициентов а,с, и k их выражения через
![]() ,
,
![]() ,
, ![]() , тогда получим
, тогда получим
-![]()
![]() £
£![]() y(t)=
y(t)=![]() £
£![]()
![]() (16)
(16)
Согласно рис. 5 и условия (16) получаем:
1) при ![]() =
= ![]() , y(t)=0
, y(t)=0
2) при ![]() >
> ![]() , y(t)>0
, y(t)>0
3) при ![]() <
< ![]() , y(t)<0,
, y(t)<0,
что и требовалось доказать.
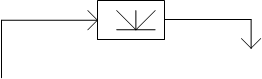
Теперь рассмотрим нашу систему с логическим алгоритмом управления, ее логическая схема приведена на рис. 6.
![]() |x|=c
|x|=c
![]()
![]()
![]()
![]()

![]()


![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]() l g s
z
l g s
z
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() (-) x G(p)
(-) x G(p) ![]() (p)
(p) ![]()

![]()
![]()
![]()
![]()
Рисунок 6.
В данном случае считаем что:
![]() -
варьируемая величина,
-
варьируемая величина,
![]() =0.5,
=0.5,
![]() =0.1
(анализ поведения системы при изменении данного параметра исследуется в работе
ст-та Новикова, мы берем оптимальное значение),
=0.1
(анализ поведения системы при изменении данного параметра исследуется в работе
ст-та Новикова, мы берем оптимальное значение),
![]() =0.1,1
(коэффициент обратной связи),
=0.1,1
(коэффициент обратной связи),
![]() =10,100.
=10,100.
Рассмотрим теперь саму функцию:
W(p)=G(p)W![]() (p),
(p),
где G(p) - функция корректора, W![]() (p)=
(p)= ![]() (p)W
(p)W![]() (p), где
(p), где
![]() (p)=
(p)=![]() , а W
, а W![]() (p) в свою очередь будет:
(p) в свою очередь будет:
