

 Курсовая работа: Анализ режимов автоматического управления
Курсовая работа: Анализ режимов автоматического управления
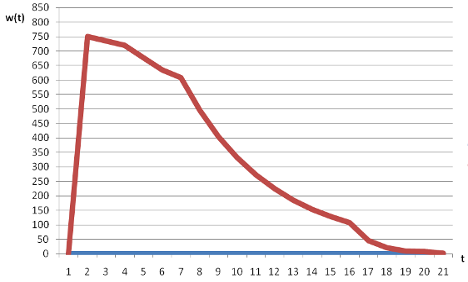
Рисунок 5. Весовая характеристика апериодического звена второго порядка
1.5 Исследование устойчивости САУ
Устойчивость - это свойство системы возвращаться в исходный или близкий к нему установившийся режим после всякого выхода из него в результате какого-либо воздействия.
Критерий устойчивости Рауса-Гурвица.
Это алгебраический критерий, по которому условия устойчивости сводятся к выполнению ряда неравенств, связывающих коэффициенты уравнения системы. В разной форме этот критерий был предложен английским математиком Е. Раусом и затем швейцарским математиком А. Гурвицем в конце прошлого века. Приведем без доказательства этот критерий в форме Гурвица.
Возьмем характеристический полином, определяющий левую часть уравнения системы,
D (l) = a0ln + a1ln - 1 + … + an-1l + an (1.13)
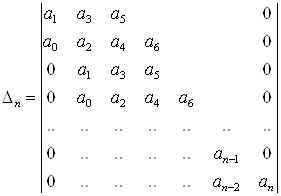
где полагаем a0 > 0, что всегда можно обеспечить умножением при необходимости полинома на - 1. Составим из коэффициентов этого полинома определитель
 (1.14)
(1.14)
Этот определитель называется определителем Гурвица. Он имеет п строк и п столбцов. Первая строка содержит все нечетные коэффициенты до последнего, после чего строка заполняется до положенного числа п элементов нулями. Вторая строка включает все четные коэффициенты и тоже заканчивается нулями. Третья строка получается из первой, а четвертая - из второй сдвигом вправо на один элемент. На освободившееся при этом слева место ставится нуль. Аналогично сдвигом вправо на элемент получаются все последующие нечетные и четные строки из предыдущих одноименных строк.
Условие устойчивости заключается в требовании положительности определителя Гурвица и всех его диагональных миноров.
Развернем критерий Гурвица для нескольких конкретных значений п.
Для n =2
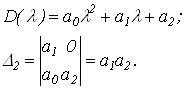
Условия устойчивости:
a0 > 0; a1 > 0; a2 > 0
(к последнему неравенству сводится неравенство D2 > 0, если учесть предыдущее неравенство а1 > 0).
Подставляя данные значения в уравнение имеем:
![]() ;
;
![]()

Можно сделать вывод, что система устойчивая.
2. Синтез системы "объект-регулятор" 2.1 Расчет оптимальных параметров регуляторов
Согласно заданию, передаточная функция объекта управления имеет вид:
![]() (2.1)
(2.1)
К = 100;
Т1 = 0,03;
Т2 = 8.9;
Т3 = 65;
Ψ = 0,92.
После подстановки числовых значений передаточная функция примет вид:
![]() (2.2)
(2.2)
Далее, находится выражение инверсной расширенной амплитудно - фазовой характеристики объекта.
Согласно ![]() (2.3)
(2.3)
![]() (2.4)
(2.4)
Так как заданное значение Y = 0.92, то по формуле (2.5) определяется значение m (m = 0.402) и подставляем его в предыдущее выражение для расширенной амплитудно-фазовой характеристики.
![]() ; (2.5)
; (2.5)
 (2.6)
(2.6)
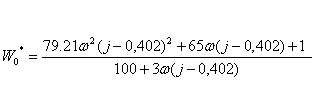
Из расширенной амплитудно-фазовой характеристики находятся действительная
![]() и
мнимая
и
мнимая ![]() части.
части.
![]() (2.7)
(2.7)
![]() (2.8)
(2.8)
Перед тем, как определить оптимальные параметры настройки П, ПИ, ПИД регуляторов необходимо определить частоту среза объекта, которая находится из выражения для амплитудно-фазовой характеристики объекта управления. АФХ объекта получается после замены оператора р на jω в заданной передаточной функции объекта.
Таким образом, АФХ примет вид:
![]() ; (2.9)
; (2.9)
По формуле (2.9), находится АЧХ объекта, на основании которой определяется частота среза.
![]() (2.10)
(2.10)
АЧХ объекта управления имеет вид:
 (2.11)
(2.11)
При нулевой частоте значение амплитуды равно 100. Следовательно, w=wс, откуда по формуле (2.12):
![]() (2.12)
(2.12)
![]() = 0.03*100 = 3.
= 0.03*100 = 3.
Таким образом, необходимо решить уравнение:
 (2.13)
(2.13)
Корни этого уравнения можно найти любым удобным методом, но при этом необходимо учитывать только положительные вещественные корни.
В данном случае для определения корней уравнения используется математический редактор Mathcad, результат расчета приведен на рисунке 6.

Рисунок 6. Результаты расчета корней уравнения в редакторе Mathcad.
Так как необходимо учитывать только положительные вещественные корни, то решением исходного уравнения являются следующий параметр w=wc = 0,45 с-1.
Для определения оптимальных параметров регулятора необходимо решить уравнение (2.14). Приравняв вещественные и мнимые части в уравнении (2.14) к соответствующим параметрам регулятора.
 (2.14)
(2.14)
Расчет оптимальных параметров настройки для П - регулятора производится следующим образом:
 (2.15)
(2.15)
Из второго уравнения системы определяется w любым удобным способом с учетом положительных вещественных корней и подставляется в первое уравнение системы. В данном случае w = 1,0218 с-1 и оптимальным параметром настройки П - регулятора является значение Кропт =0.972.
Для ПИ-регулятора расчет оптимальных значений параметров настройки производится следующим образом.
Для каждого значения частот от 0 до частоты среза определяются точки С1С0 и С1, соответствующие требуемой степени затухания Y. Оптимальным параметром является точка на линии, равной степени затухания С1С0 = f (С1), лежащая справа от глобального максимума.
Таким образом, для ПИ - регулятора по формуле (2.16) находятся параметры настройки:
 (2.16)
(2.16)
![]() (2.17)
(2.17)
Получаем уравнения:
![]() ,
,
![]()
Данные для построения графика зависимости С1С0=f (С1) для ПИ-регулятора приведены в таблице 1.
Таблица 1. Данные для определения параметров оптимальной настройки ПИ-регулятора.
| w | C0 | C1 | C0*C1 |
| 0 | 0 | -0,01 | 0 |
| 0,01 | 7,83E-05 | -0,00449 | -3,5E-07 |
| 0,02 | 0,00031 | 0,001107 | 3,43E-07 |
| 0,03 | 0,000691 | 0,00679 | 4,69E-06 |
| 0,04 | 0,001217 | 0,012558 | 1,53E-05 |
| 0,05 | 0,001884 | 0,018413 | 3,47E-05 |
| 0,07 | 0,003619 | 0,030378 | 0,00011 |
| 0,09 | 0,005862 | 0,042686 | 0,00025 |
| 0,1 | 0,007162 | 0,048967 | 0,000351 |
| 0,11 | 0,008575 | 0,055334 | 0,000475 |
| 0,12 | 0,010098 | 0,061785 | 0,000624 |
| 0,13 | 0,011724 | 0,068322 | 0,000801 |
| 0,14 | 0,013451 | 0,074942 | 0,001008 |
| 0,15 | 0,015272 | 0,081648 | 0,001247 |
| 0,16 | 0,017184 | 0,088437 | 0,00152 |
| 0,17 | 0,019183 | 0,095311 | 0,001828 |
| 0,18 | 0,021262 | 0,102269 | 0,002174 |
| 0, 19 | 0,023419 | 0,109311 | 0,00256 |
| 0,2 | 0,025648 | 0,116436 | 0,002986 |
| 0,21 | 0,027944 | 0,123645 | 0,003455 |
| 0,24 | 0,035194 | 0,145773 | 0,00513 |
| 0,26 | 0,040282 | 0,160941 | 0,006483 |
| 0,28 | 0,045529 | 0,17644 | 0,008033 |
| 0,3 | 0,050899 | 0, 192269 | 0,009786 |
| 0,32 | 0,056355 | 0, 208427 | 0,011746 |
| 0,34 | 0,061858 | 0,224913 | 0,013913 |
| 0,36 | 0,067372 | 0,241726 | 0,016286 |
| 0,38 | 0,072858 | 0,258865 | 0,01886 |
| 0,4 | 0,078279 | 0,276328 | 0,021631 |
График зависимости С1С0=f (С1) для ПИ-регулятора приведен на рисунке 7.
