

 Реферат: Следящие системы
Реферат: Следящие системы
В данном случае роль Rдоб выполняет выходное сопротивление усилителя. Так как добавочное сопротивление включено последовательно с якорной обмоткой двигателя, то они суммируются. С учетом этого
R = Rя+Rдоб = Rя+Rвых
Выходное сопротивление ЭМУ
![]() Ом,
Ом,
где ![]() -
степень недокомпенсации ЭМУ.
-
степень недокомпенсации ЭМУ.
R = Rя+Rвых=4,58+13,357=17,937 Ом
В зависимости от значения R двигатель обеспечивает различные значения пускового момента. Если добавочное сопротивление в цепи якоря отсутствует, то считают, что двигатель работает на естественной характеристике.
Механическая характеристика
двигателя постоянного тока с независимым возбуждением.
![]() Ωдв
Ωдв
 Ωхх
Ωхх
![]() γ
γ
![]() Мп Мвр
Мп Мвр
Естественная характеристика отличается наибольшим углом наклона к оси скоростей и наибольшим пусковым моментом.
Если Rдоб≠0, двигатель будет работать на искусственной механической характеристике.
Конструктивная постоянная Се может быть вычислена на основе номинальных паспортных данных:
![]()
![]()
Определяем коэффициент внутреннего демпфирования fдв:
fдв=![]()
Для определения оптимального передаточного числа редуктора необходимо найти момент инерции двигателя с подключенным к нему редуктором Jдр
Jдр= Jдв + Jр, где
Jдв - момент инерции двигателя;
Jр - момент инерции редуктора, приведенный к валу двигателя.
Для мощных двигателей: Jр=0,1 Jдв
С учетом этого: Jдр= Jдв +0,1 Jдв=1,1 Jдв
Момент инерции двигателя находим из махового момента по формуле:
Jдв=![]() ,где
,где
G - маховый момент, кг м2.
Jдр=1,1*4*10-3=4,4*10-3
Подставив найденные значения в формулу для нахождения оптимального передаточного числа редуктора, получим:
iопт=
Определим передаточное число редуктора из условия обеспечения точности воспроизведения заданного закона движения управляющей оси. Для этого найдем требуемый пусковой момент:
МП=![]()
Минимальный пусковой момент:
МП min=2
Взяв отношение Мп к Мп min получим:
![]()
![]()
 Мп
Мп
![]()
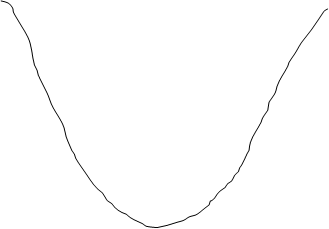
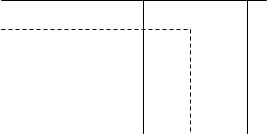
Из графика изображенного на рис.1 видно, что при МП/МП min =1система может воспроизвести заданный закон движения только при.
Если МП/МП min >1, то любое значение передаточного числа редуктора, взятое в интервале 0,8< i<1,4 (для МП/МП min=1,227), обеспечит воспроизведение заданного закона движения, причем при больших значениях i получаются меньшие значения электромеханической постоянной времени системы. С учетом сказанного возьмем i/iопт=1,2, при этом передаточное число редуктора
i = iопт 1,2= 3,64*1,2=4,368 ≈ 4
С учетом найденных значений произведем проверку двигателя по максимальной скорости вращения, которая должна удовлетворять условию:
Ωдв max ≤ (1.2 - 1.3) Ωдв ном, где
Ωдв max = ΩН max i
Ω дв max = 6*4=24 рад/с
24 ≤ 1,2*104,72= 125,66
Расчет кинематики редуктора.
Для этого выберем число пар зацепления по номограмме, изображенной на рис.2.
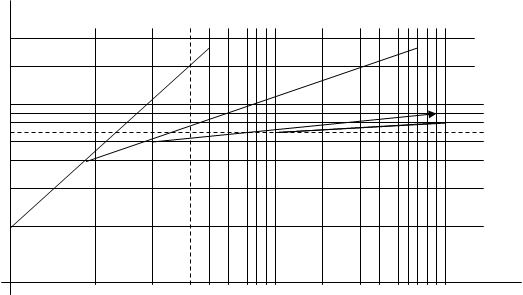
Взяв две пары зацеплений определим передаточное число каждой пары. Для получения минимальной инерционности редуктора передаточное число каждой последующей пары должно быть связано с передаточным числом предыдущей пары соотношением:
in+1=![]()
Для того, чтобы получить минимальный момент инерции редуктора Jp, приведенного к валу двигателя, следует учитывать тот факт, что инерционность ближайших к двигателю вносит наибольший вклад в Jp. В связи с этим размеры шестерни, непосредственно связанной с валом двигателя следует выбирать по возможности меньшими. По этой причине передаточное число первой пары не должно превышать 2 - 3.
С учетом вышесказанного передаточное число первой пары примем i1=1,8
Следовательно: i2 =![]()
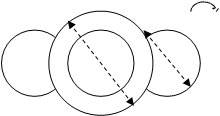
Так как номограммы построены в предположении, что диаметры первой шестерни и третьей шестерни одинаковы, кинематическую схему редуктора можно представить следующим образом:
 |
|||||
![]()
![]()
![]()
![]()

Выбор типа усилителя и расчет его коэффициента усиления по заданной мощности.
В связи с тем, что в системе применяется двигатель постоянного тока мощностью свыше 100 Вт, в качестве усилителя мощности (УМ) целесообразнее применить электромашинный усилитель (ЭМУ).
Для обеспечения нормальной работы двигателя в качестве УМ возьмем ЭМУ - 3А, который обладает следующими техническими характеристиками:
| Параметры генератора | Параметры двигателя | |||||||||||
| Мощность, Вт | Скорость вращения, об/мин. | Напряжение, В | Сила тока, А | КПД | Обмотки управления | Мощность, Вт | КПД | Напряжение, В | Род тока питающего приводной двигатель | |||
| Число обмоток | Входная мощность, Вт | Коэффициент усиления по мощности | Ток управления, мА | |||||||||
| 0,32 | 2850 | 115 | 1,82 | 0,6 | До 4 | 0,4 | 500 | 11 | 0,455 | 0,71 | 220 |
3х-ф |
