

 Реферат: Курсовик по электротехнике
Реферат: Курсовик по электротехнике
Схема замещения асинхронного двигателя
Для анализа работы асинхронного двигателя пользуются схемой замещения. Схема замещения асинхронного двигателя аналогична схеме замещения трансформатора и представляет собой электрическую схему, в которой вторичная цепь (обмотка ротора) соединена с первичной цепью (обмоткой статора) гальванически вместо магнитной связи, существующей в двигателе.
Основное отличие асинхронного двигателя от трансформатора в электрическом отношении состоит в следующем. Если в трансформаторе энергия, переданная переменным магнитным полем во вторичную цепь, поступает к потребителю в виде электрической энергии, то в асинхронном двигателе энергия, переданная вращающимся магнитным полем ротору, преобразуется в механическую и отдается валом двигателя потребителю в виде механической энергии.
Электромагнитные мощности, передаваемые магнитным полем во вторичную цепь трансформатора и ротору двигателя, имеют одинаковые выражения:
Рэм = Р1 – ΔР1.
В трансформаторе электромагнитная мощность за вычетом потерь во вторичной обмотке поступает потребителю:
Р2 = Рэм – 3I22 r2 = 3U2 I2 cosφ2 = 3I22 rП = 3I ' 22 r' П,
где rП – сопротивление потребителя.
В асинхронном двигателе электромагнитная мощность за вычетом потерь в обмотке ротора превращается в механическую мощность:
Р2 = Рмех = Рэм – 3I22 r2 = Pэм – 3I'22 r'2
Pмех = [3 I22 r2 (1–s)]/s = 3I'22 r'2 (1–s)]/s = 3I22 r'э = 3I'22 r'э ,
где r'э = [r'2 (1–s)]/s
Сравнивая выражения можно заключить, что r'П = r'э .
Таким образом, потери мощности в сопротивлении численно равны механической мощности, развиваемой двигателем.
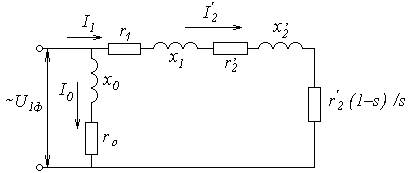
Схема замещения
Заменив в схеме замещения трансформатора сопротивление нагрузки r'П на r'э = [r'2 (1–s)]/s, получим схему замещения асинхронного двигателя. Все остальные элементы схемы аналогичны соответствующим элементам схемы замещения трансформатора: r1, x1 – активное сопротивление и индуктивное сопротивление рассеяния фазы обмотки ротора.
Приведенные значения определяются так же, как и для трансформатора:
r'2 = r2 k2 , x'2 = x2 k2,
где k = E1 /E2k = U1ф /E2k – коэффициент трансформации двигателя.
Может возникнуть сомнение в возможности использования гальванической связи цепей статора и ротора в схеме замещения, поскольку частоты в этих цепях на первый не одинаковы. Первая часть схемы замещения представляет собой эквивалентную схему фазы обмотки ротора, которая приведена к частоте тока статора. В реальном же двигателе в отличие от схемы замещения частоты тока ротора и статора не одинаковы.
Механическая характеристика асинхронного двигателя
Механической характеристикой называется зависимость частоты вращения ротора двигателя или скольжения от момента, развиваемого двигателем при установившемся режиме работы: n = f(M) или s = f(M).
Механическая характеристика является одной из важнейших характеристик двигателя. При выборе двигателя к производственному механизму из множества двигателей с различными механическими характеристиками выбирают тот, механическая характеристика которого удовлетворяет требованиям механизма.
Уравнение механической характеристики асинхронного двигателя может быть получено на основании формулы Мэм = (3I22r2)/ω0s и схемы замещения.
С помощью схемы замещения определяют приведенный ток фазы ротора:
______________________________________
I'2 = U1ф /√(r1 + r'2/s) + (x1 + x'2)2
где
r'2/s = r'2 + r'2(1– s)/s
Полученное значение тока I'2 подставляют в уравнение момента, в котором предварительно I2 и r2 заменяют через их приведенные значения:
М = (3I22r2)/ω0s = (3I'22r'2)/ω0s
После подстановки получим
I'2 = 3U1ф2 r'2 / ω0s [(r1 + r'2/s) + (x1 + x'2)2] (1)
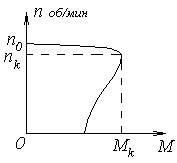
Это выражение представляет собой уравнение механической характеристики, поскольку оно связывает момент и скольжение двигателя. Остальные входящие в уравнение величины: напряжение сети и параметры двигателя – постоянны и не зависят от s и M. Располагая параметрами двигателя, можно рассчитать и построить его механическую характеристику, которая будет иметь вид:
 Однако
необходимо отметить, что после включения двигателя в нем происходят сложные
электромагнитные процессы. В тех случаях, когда время разбега оказывается
соизмеримым с временем электромагнитных процессов, механическая характеристика
двигателя будет существенно отличаться от статической.
Однако
необходимо отметить, что после включения двигателя в нем происходят сложные
электромагнитные процессы. В тех случаях, когда время разбега оказывается
соизмеримым с временем электромагнитных процессов, механическая характеристика
двигателя будет существенно отличаться от статической.
Одной из важнейших точек характеристики, представляющей интерес при анализе работы и выборе двигателя, является точка, где момент, развиваемый двигателем, достигает наибольшего значения. Эта точка имеет координаты nкр , sкр , Mmax .
Значение критического скольжения sкр , при котором двигатель развивает максимальный (критический) момент Mmax , легко определить, если взять производную dM/ds выражения (1) и приравнять ее нулю.
После дифференцирования и последующих преобразований выражение sкр будет иметь следующий вид:
________
sкр = ± r'2/√r12 + xк2 (2)
где xк = x1 + x'2
Подставим sкр вместо s в уравнение (1), получим выражение максимального момента
________
Мmax = 3U1ф2 / 2ω0s (r1 ± √r12 + xк2) (3)
Необходимо отметить, что из выражений (1) – (3) вытекает следующее.
Момент, развиваемый двигателем, при любом скольжении пропорционален квадрату напряжения. Максимальный момент пропорционален квадрату напряжения и не зависит от сопротивления цепи ротора. Критическое скольжение пропорционально сопротивлению цепи ротора и не зависит от напряжения сети.
Полученные выражения удобны для анализа, однако, из-за отсутствия в каталогах параметров r1 , x1 , x2 их использование для расчетов и построений характеристик затруднено.
В практике обычно пользуются уравнением механической характеристики, с помощью которой можно произвести необходимые расчеты и построения, используя только каталожные данные.
Активное сопротивление обмотки статора r1 значительно меньше остальных сопротивлений статора и ротора, и им обычно пренебрегают. Тогда выражения (1) – (3) будут иметь вид
М = 3U1ф2r'2 /ω0s [( r'2 /s)2 + xк2] (4)
sкр = ± r'2/ xк (5)
Мmax = 3U1ф2 /2ω0 xк (6)
Упрощенное уравнение механической характеристики получается из совместного решения уравнений (4) – (6)
M = 2Mmax/(s/sкр + sкр /s) (7)
Значение Mmax определяется из соотношения Mmax /Mном = λ, указанного в каталогах, а sкр – из уравнения (7), если решить его относительно sкр и вместо текущих значений s и M подставить их номинальные значения, которые легко определить по паспортным данным:
_____
sкр = sном(λ ± √λ2 – 1) (8)
где sном = (n0 – nном )/n0 ; λ = Mmax /Mном .
Следует отметить, что в зоне от М = 0 до М ≈ 0,9Мmax механическая характеристика близка к прямой линии. Поэтому, например, при расчетах пусковых и регулировочных резисторов эту часть механической характеристики принимают за прямую линию, проходящую через точки M = 0, n = 0 и Mном, nном. Уравнение механической характеристики в этой части будет иметь вид
M = s Mном / sном
Пуск асинхронных двигателей
Для пуска двигателя его обмотку статора подключают к трехфазной сети с помощью выключателя. После включения выключателя происходит разгон двигателя. Двигатель разгоняется до устанавливающейся частоты вращения, при котором момент, развиваемый двигателем, равен моменту сил сопротивления на его валу.
В условиях нормальной работы момент на валу двигателя может изменяться в довольно широких пределах, однако, если момент окажется больше Mmax , двигатель остановится. Обычно считают, что допустимые изменения находятся в пределах от М = 0 до М = (0,8 ÷ 0,9) Mmax . Естественно, имеется в виду работа в зоне характеристики, где s < sкр .
