

 Реферат: Электропривод подъемного механизма крана
Реферат: Электропривод подъемного механизма крана
2. РАЗРАБОТКА СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ.
2.1. Расчет и построение статических характеристик в разомкнутой системе.
Статические характеристики в разомкнутой системе могут быть построены по следующим выражениям:
где Rя.дв – сопротивление якорной цепи двигателя с учетом нагрева:
![]() Ом
Ом
Ток возбуждения двигателя:
![]() А
А
Номинальный ток якоря:
![]() А
А
Статические скорость и момент:
wс=144,67 1/с;
Мс.под=106,918 Нм;
Мс.сп=68,428 Нм.
Из уравнений для статических характеристик:
![]() В/с
В/с
ЭДС преобразователя при wс и Мс.под:
![]() В.
В.
ЭДС преобразователя при wс и Мс.сп:
![]() В.
В.
Уравнение статической механической характеристики при Еп.необх.под:
![]() ;
;
![]() .
.
Уравнение статической механической характеристики при Еп.необх.сп:
![]() ;
;
![]() .
.
Максимальная ЭДС преобразователя при a=0:
![]() В.
В.
Уравнение статической характеристики при Еп.max:
![]() ;
;
![]() .
.
Статическая характеристика при Еп=0:
![]() ;
;
![]() .
.
Естественная статическая характеристика:
![]() ;
;
![]() .
.

Рис.5. Статические и динамические характеристики в разомкнутой системе.
Рассчитаем нагрузочную диаграмму двигателя за цикл при линейном изменении ЭДС преобразователя.
Жесткость статической механической характеристики:
![]() В2с2/Ом
В2с2/Ом
Электромеханическая постоянная времени:
![]() с
с
Расчетная суммарная индуктивность цепи якоря:
![]() Гн
Гн
Электромагнитная постоянная времени:
![]() с
с
Соотношение постоянных времени:
![]()
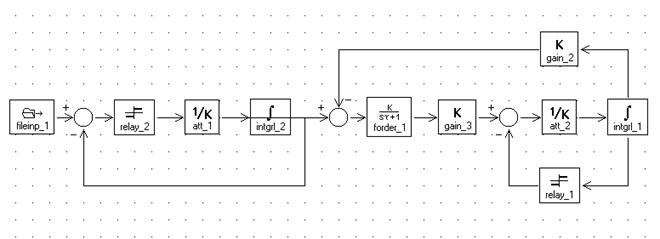
Для построения нагрузочной диаграммы двигателя за цикл при линейном изменении ЭДС, используем ЭВМ и программу 20-sim. Для моделирования введем в компьютер схему, представленную на рис. 6. Параметры для моделирования представлены в приложении 1.
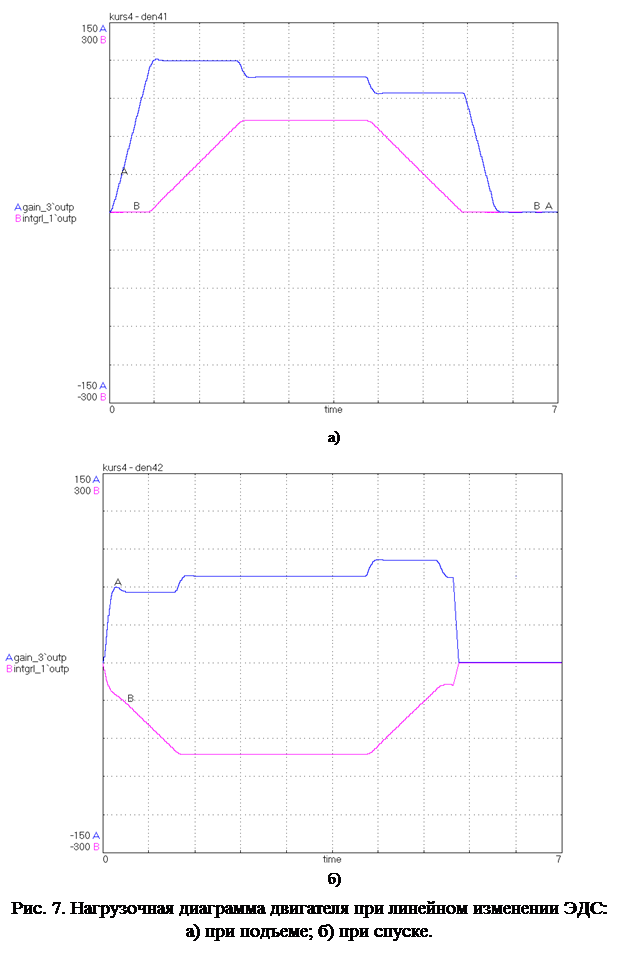
Нагрузочная диаграмма процесса
представлена на рис. 7
Рис. 6. Схема для расчета нагрузочной диаграммы двигателя при линейном изменении ЭДС.
2.2. Выбор структуры замкнутой системы электропривода, расчет ее параметров.
В соответствии с рекомендациями выберем систему ТП-Д с подчиненным регулированием координат с настройкой на технический оптимум.
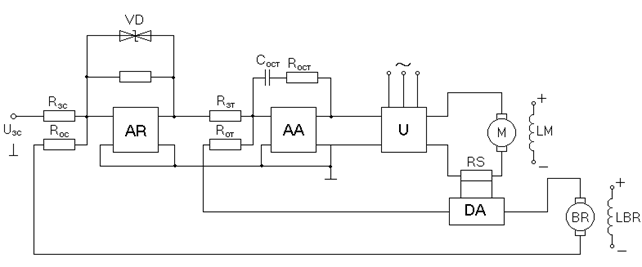
Рис. 8. Принципиальная схема подчиненного регулирования тока и скорости в системе ТП-Д.
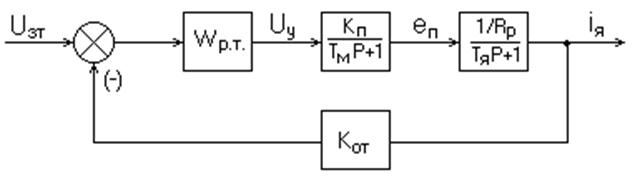
2.2.1. Расчет контура тока
Рис. 9. Структурная схема регулирования тока.
Отнесем время запаздывания тиристорного преобразователя tп и инерционность фильтров Тф к некомпенсированным постоянным времени, т.е. Тm=tп+ Тф=0,01 с. Тогда, если не учитывать внутреннюю обратную связь по ЭДС двигателя, можно записать передаточную функцию объекта регулирования тока:
![]() ,
,
где kп – коэффициент усиления преобразователя.
Желаемая передаточная функция прямого канала разомкнутого контура при настройке на технический оптимум:
![]() ,
,
где ат=Тот/Тm - соотношение постоянных времени контура.
Отношение Wраз.п к Wорт есть передаточная функция регулятора тока:
![]() ,
,
где Тит – постоянная интегрирования регулятора тока:
![]()
Из выражения для Wр.т. видно, что необходим ПИ-регулятор тока.
Коэффициент усиления пропорциональной части:
kут=Тя/Тпт или kут=Rост/Rзт
Постоянная времени ПИ-регулятора:
Тпт=RзтСост
Компенсируемая постоянная времени регулятора:
![]()
Отсюда,
![]() Ом,
Ом,
где Тя=Тэ – электромагнитная постоянная времени.
Коэффициент обратной связи по току:
![]() ,
,
где kш – коэффициент передачи шунта;
kут – коэффициент усиления датчика тока.
![]()
Шунт выбираем с условием Iшн>Iяmax
![]() А
А
Выбираем шунт типа ШС-75. Его параметры: Iшн=100 А Uшн=75 мВ
Коэффициент передачи датчика тока:
![]()
Примем Rот=Rзт, тогда
![]() В/А
В/А
Коэффициент усиления преобразователя:
![]()
Постоянная интегрирования ПИ-регулятора:
![]()
Коэффициент усиления регулятора:
![]()
![]() Ом
Ом
Стопорный ток:
![]() А
А
Номинальное значение задания:
![]() В
В
2.2.2. Расчет контура скорости.
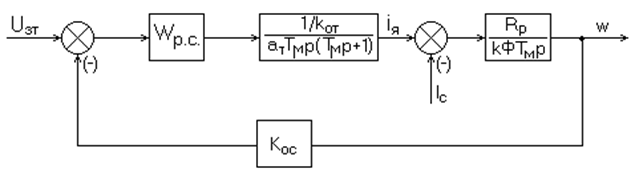
Рис. 10. Структурная схема контура скорости.
Объект регулирования скорости состоит из замкнутого контура регулирования тока и механического звена электропривода и имеет вид
![]() .
.
Некомпенсированная постоянная времени для контура скорости в ат раз больше, чем для контура тока:
![]() с.
с.
Желаемая передаточная функция разомкнутого контура:
![]() ,
,
где ас=Тос/Тmс – соотношение постоянных времени. ас=2 в настроенном на технический оптимум контуре.
Передаточная функция регулятора скорости (Wраз.с/Wорс):
![]() .
.
Очевидно, что необходимо применить пропорциональный регулятор скорости (П-регулятор)
Его коэффициент усиления kус=Wр.с.
В замкнутой системе wс и Мс связаны соотношением:
![]()
Коэффициент обратной связи по скорости:
 В/с
В/с
Коэффициент усиления П-регулятора
![]() .
.
Максимальная скорость холостого хода:
![]()
Зададимся Rосс=100 кОм, тогда:
![]() Ом
Ом
Допустим, используется тахогенератор с kтг=0,32 Вс. Тогда при w0=w0з.max максимальная ЭДС тахогенератора:
![]() В.
В.
Сопротивление в цепи обратной связи по скорости:
![]() кОм.
кОм.
2.3. Расчет и построение статических характеристик в замкнутой системе.
В замкнутой системе при М<119,37 Нм, уравнение статической характеристики:
![]()
![]()
При М=Мстоп=119,37 Нм скорость равна:
![]() 1/с.
1/с.
2.4. Разработка схемы управления электроприводом.
Схема управления электроприводом выполнена на базе операционных усилителей постоянного тока и включает в себя регулятор тока (АА), регулятор скорости (AR), датчик интенсивности SJ. Тахогенератор BR с делителем напряжения R3 и R1 является датчиком скорости. Сигнал задания формируется в блоке задания. Уровень сигнала задания изменяется потенциометром RP, а его полярность задается с помощью реле KV1 и KV2 (движение вперед и назад). Реле KF – реле обрыва поля.
