

 Реферат: Тестирование программных продуктов
Реферат: Тестирование программных продуктов
Регистрация экспериментов и ошибок (инцидентов), периодическая обработка данных и анализ результатов позволяют контролировать испытания и управлять этим процессом. Сама процедура регистрации может быть разной, важно лишь предотвратить потерю ценной информации при минимальных трудозатратах на сбор и обработку данных. Данное условие можно обеспечить только путем максимальной автоматизации всех процессов.
Критерий интенсивности обнаружения ошибок. Если считать, что во время одного эксперимента обнаруживается не более одной ошибки и каждая ошибка до начала следующего эксперимента устраняется, то можно предположить, что при благоприятном ходе отладки и испытания кривая зависимости: N = 1 — п/К, где п — количество обнаруженных и устраненных ошибок; К. — . количество экспериментов, будет асимптотически стремиться к единице (кривая 1 на рис. 17). Кривая 2 свидетельствует о неблагополучном ходе процесса.
Тогда в качестве критерия прекращения испытаний можно принять, например, следующее условие: N > 0,95 при обнаружении в последних двухстах экспериментах не более трех несущественных ошибок.
Идея выбора такого критерия основана на том, что частота обнаружения ошибок, выраженная отношением п/К, по мере увеличения количества экспериментов должна уменьшаться и к моменту завершения испытаний принять значение, близкое к нулю. Следует иметь в виду, что оценка уровня завершенности испытаний по этому показателю будет достоверной лишь в том случае, если каждый эксперимент проводится в новых условиях и испытатели стремятся обнаружить ошибки, а не доказать их отсутствие. Если же программу проверяют при одних и тех же или близких условиях, то довольно быстро получают кривую вида 1, которая не свидетельствует ни о полноте, ни о глубине проверки программ, ни об отсутствии в ней ошибок.
Критерий заданного значения средней наработки на отказ (критерий Дж. Д. Муса). Сделано два предположения. 1. Суммарное количество обнаруженных и устраненных дефектов в про
грамме (под дефектом
понимается любая причина неудовлетворенности свойствами программы) описывается
показательной функцией времени функционирования ![]()
![]()
![]() - исходное количество дефектов в программе;
- исходное количество дефектов в программе; ![]() - общее количество дефектов,
которое может проявиться за время эксплуатации ПС;
- общее количество дефектов,
которое может проявиться за время эксплуатации ПС; ![]() — средняя наработка на отказ в начале испытаний;
— средняя наработка на отказ в начале испытаний;
С—коэффициент сжатия тестов. Коэффициент С![]() 1 тогда, когда
абсолютная реактивность программы при прогоне тестов или статистических
испытаниях отличается от абсолютной реактивности при работе программы в
реальных условиях. Если, например, за один час испытаний моделируется
управляемый процесс, происходящий в реальных условиях в течение десяти часов,
то коэффициент сжатия С принимается равным 10.
1 тогда, когда
абсолютная реактивность программы при прогоне тестов или статистических
испытаниях отличается от абсолютной реактивности при работе программы в
реальных условиях. Если, например, за один час испытаний моделируется
управляемый процесс, происходящий в реальных условиях в течение десяти часов,
то коэффициент сжатия С принимается равным 10.
Скорость обнаружения и устранения дефектов, измеряемая относительно времени функционирования программы, пропорциональна интенсивности отказов. Коэффициент пропорциональности B=n/m называется коэффициентом уменьшения дефектов.
Количество зарегистрированных отказов т зависит от суммарного времени функционирования программы следующим образом:
![]()
Значение средней наработки на отказ также зависит от суммарного времени функционирования:
![]()
Если в ходе испытания обнаруженные ошибки устраняются, то текущее значение средней наработки на отказ будет увеличиваться. Таким образом, в качестве критерия завершенности испытания можно принять достижение требуемого (заданного) значения средней наработки на отказ Tо. Тогда, определяя периодически текущее значение средней наработки на отказ по этой формуле , можно при планировании дальнейшего хода испытания рассчитать требуемое время для дальнейшего прогона программы по формуле
![]()
При планировании отладки и испытания ПО следует учитывать влияние следующих факторов: 1) скорости выявления дефектов; 2) скорости устранения дефектов; 3) удовлетворенности машинным временем. Первый фактор зависит от укомплектованности и квалификации испытателей, второй—от укомплектованности и квалификации группы программистов отладчиков, третий — от фондовооруженности (технической оснащенности) разрабатывающей (испытывающей) организации.
На начальной стадии отладки программы интенсивность выявления дефектов высока. Программисты-отладчики перегружены работой, приходится даже прерывать тестовые прогоны, делать перерывы в испытаниях. На заключительной стадии интенсивность обнаружения дефектов низкая, но остро ощущается необходимость в машинном времени. Испытатели перегружены в подготовке все новых и новых тестовых исходных данных, в то время как у программистов-отладчиков работы может быть мало.
СТЕНДЫ ОТЛАДКИ И ИСПЫТАНИЯ ПРОГРАММ.
Идея имитационного моделирования положена в основу создания комплексных имитационно-моделирующих испытательных стендов, используемых для отладки и испытания сложных систем управления в реальном масштабе времени.
Комплексный имитационно-моделирующий испытательный стенд (КИМИС) представляет собой совокупность средств испытываемой системы и их моделей, модели внешней среды и программ обработки результатов моделирования, функционально объединенных на основе испытываемого программного комплекса. Комплексные имитационно-моделирующие испытательные стенды используются при полигонных испытаниях сложных систем.
Общая идея создания КИМИС основана на том, что для испытания (исследования) ПС, реализованного непосредственно на управляющей ЭВМ, необходимо моделировать управляемый процесс и имитировать поступление в ЭВМ информации об этом процессе. Испытываемое ПС безразлично к непосредственным источникам информации. Важно лишь, чтобы вся информация была распределена по реальным физическим каналам ЭВМ и временным тактовым интервалам, а также соответствовала заданному (ожидаемому) диапазону условий внешней среды. Сопряжение моделей с реальными средствами системы необходимо для оценки результатов моделирования путем их сравнения с реальными данными. Использование в составе КИМИС непосредственно самого ПС, а не его модели, позволяет получить более достоверные результаты при моделировании и избежать больших дополнительных трудозатрат на разработку модели ПС.
Для создания КИМИС, помимо основной ЭВМ, на которой реализуется испытываемое ПС, используют ЭВМ примерно такой же производительности для реализации комплекса моделей соответствующего назначения. Первую ЭВМ (ВС) обычно называют технологической, вторую—инструментальной. Инструментальная ЭВМ и программное обеспечение образуют КИМИС. Такие КИМИС являются кроссовой системой (КРОСС-КИМИС). Моделируемые (имитируемые) на инструментальной ЭВМ данные передаются в технологическую ЭВМ, где и обрабатываются как реальные данные. Программное обеспечение КИМИС может быть реализовано и на технологической ЭВМ (Резидент-КИМИС). Но такой вариант используется сравнительно редко из-за дефицита памяти и производительности в технологических (управляющих) ЭВМ.
Автоматизированный технологический комплекс (АТК) состоит из элементов следующих типов: управляемый технологический агрегат (УТА), автоматизированная система управления технологическим процессом (АСУ ТП), датчики информации (ДИ) о состоянии управляемого процесса. На вход АТК поступает объект обработки (00), на выход—результат обработки (РО). Если прекратить доступ информации в ЭВМ от реальных физических объектов АТК, а вместо нее вводить адекватную ин формацию, имитируемую по КИМИС на инструментальной ЭВМ , то процесс функционирования ПО АСУ ТП будет адекватен реальному. Оператор УТА в принципе может участвовать в обеих режимах.
Программное обеспечение КИМИС в общем случае состоит из следующих подсистем: моделирования, анализа результатов испытания, регистрации событий (документирования), планирования и управления и базы данных (рис. 20). В состав подсистемы моделирования входят: модель заявок на обработку (МЗ), модель объекта обработки (МОО); модели датчиков информации (МДИ); имитатор помех (ИП); модель управляемого технологического агрегата (МТА).
Модель заявок имитирует поток заявок на обработку (например, поток слябов) исходя из плановых и производственных соображений
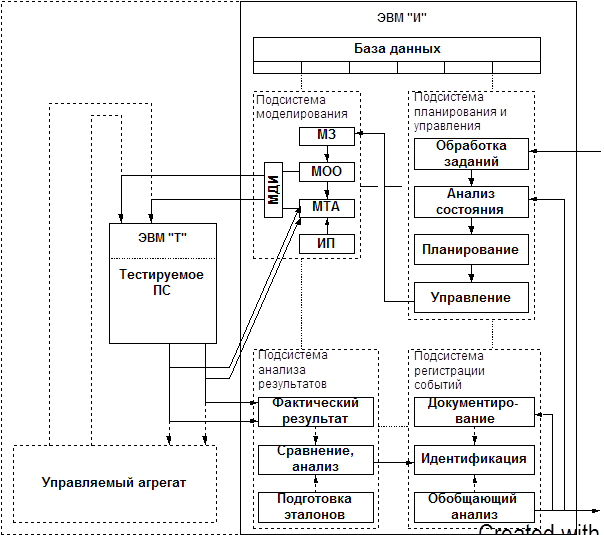
В соответствии с заданным приоритетом или случайным образом выбирается 00, принимаемый на обслуживание, из совокупности 00, имитируемой МЗ, и его характеристики. Модели датчиков информации являются информационными моделями конкретных типов датчиков информации, используемых в системе управления АТК. Они имитируют выдачу текущих координат характеризующих состояние технологического процесса. Модель управляемого технологического агрегата (например, прокатного стана) имитирует управляемый технологический процесс (например, прокатки стали) с выдачей соответствующей информации об этом процессе. Имитатор помех в соответствии с заданными вероятностными характеристиками имитирует воздействие случайных факторов на элементы моделируемой системы и управляемый процесс. При этом используется датчик случайных чисел, позволяющий реализовать процедуру “розыгрыш”.
Таким образом, подсистема моделирования, имитируя технологический процесс в управляемом агрегате, обеспечивает воспроизведение потока входной информации в управляющую ЭВМ, адекватного этому потоку в реальных условиях эксплуатации АТК.
Страницы: 1, 2, 3, 4, 5, 6, 7, 8, 9
