

 Реферат: Шагающие роботы
Реферат: Шагающие роботы
Для шагающего робота в процессе выноса ног должен осуществляться контроль высоты положения стоп над поверхностью. Если высота любой из стоп становится меньше допустимой, то производится подъем ноги до достижения нужной высоты, а затем продолжается вынос ног вперед. Конец движения определяется одним из следующих условий:
Во время вспомогательной фазы должно происходить восстановление горизонтального положения и заданной высоты платформы, а также смещение центра тяжести в зону равновесия;
Зона достаточной устойчивости может быть определена через разность усилий в максимально и минимально нагруженных опорах, которая не должна превышать допустимой величины. Введение центра тяжести шагающего устройства в зону допустимой устойчивости достигается путем задания горизонтального движения платформы, что задается блоком поддержания равновесия.
Исследование бега таракана позволило сделать следующие выводы. Непрерывная походка типа 3—3 образуется в результате слияния фаз прерывистой походки. Непрерывная походка экономичнее прерывистой и обеспечивает большую скорость перемещения при тех же динамических нагрузках, однако, она может использоваться только для перемещения по сравнительно ровной поверхности.
Для общей ориентации шагающей машины в пространстве необходимо применять комплекс управляющих алгоритмов, представляющих многоуровневую иерархическую систему.
Следует отметить, что кинематика шагающего робота позволяет существенно уменьшить возможность потери проходимости, будет более маневренной, сможет проходить по сильно пересеченной местности. Опорные элементы шагающего робота имеют значительно большую зону возможных контактов с поверхностью передвижения по сравнению с колесом или гусеницей.
Пример шагающего аппарата
В качестве достойного примера шагающей машины можно рассмотреть разработку Донецкого Национального Технического Университета – шагающий аппарат «Катарина».
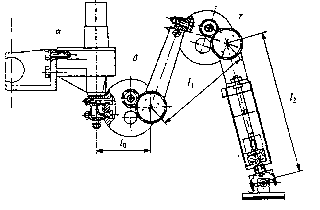
Шагающий аппарат содержит корпус, снабженный шестью ногами. В центре корпуса расположен гироскопический датчик, сообщающий системе управления информацию об ориентации корпуса по отношению к вектору силы тяжести; в передней части укреплен оптический дальномер, доставляющий информацию о поверхности, по которой перемещается шагающий робот. Шестиугольный корпус служит как носитель (основа) для шести конечностей, а также для рабочей платформы. Внутри корпуса размещается микропроцессорная система управления и силовая часть.
Каждая конечность имеет три степени свободы, и приводится в действие с помощью двигателя с механизмом (передача, коробка передач, редуктор). В нижней части конечности находятся три датчика усилия для измерения реакции силы ноги.
Основные характеристики шагающего аппарата “Катарина”:
· высота корпуса – 10 см; · длина стороны – 17 см;
· общая масса – 21 кг; · размер конечности – 40,5 см;
· масса конечности – 2.8 кг; · масса корпуса с микропроцессором – 3,8 кг;
· скорость – около 0,4 км/ч; · полезная нагрузка – 5 кг;
· длина бедра – 13,4 см; · длина голени – 20,2 см;
· поверхность касания конечности – 28,3 см2.
![]()
![]() Система управления шагающим аппаратом формирует и
исполняет управляющие сигналы, обеспечивающие движение аппарата с
автоматической адаптацией: к малым неровностям поверхности по командам
оператора (или верхнего уровня), задающего основные характеристики ходьбы и
движение корпуса аппарата. На входы системы поступают сигналы от следующих
датчиков, установленных на макете: шести датчиков контакта стопы с поверхностью;
датчиков усилий, развиваемых ногами; гировертикали; оптического дальномера. Ее
выходы (выходы блока преобразователей координат) являются входами блока
усилителей следящих систем (БУСС), состоящего из 18 отдельных усилителей, на
входы которых поступают сигналы с 18 позиционных датчиков углов поворота
звеньев ног.
Система управления шагающим аппаратом формирует и
исполняет управляющие сигналы, обеспечивающие движение аппарата с
автоматической адаптацией: к малым неровностям поверхности по командам
оператора (или верхнего уровня), задающего основные характеристики ходьбы и
движение корпуса аппарата. На входы системы поступают сигналы от следующих
датчиков, установленных на макете: шести датчиков контакта стопы с поверхностью;
датчиков усилий, развиваемых ногами; гировертикали; оптического дальномера. Ее
выходы (выходы блока преобразователей координат) являются входами блока
усилителей следящих систем (БУСС), состоящего из 18 отдельных усилителей, на
входы которых поступают сигналы с 18 позиционных датчиков углов поворота
звеньев ног.
Система управления состоит из следующих крупных блоков: блока управляемых генераторов шаговых циклов, который содержит шесть идентичных генераторов, формирующих в плоскости некоторых вспомогательных декартовых координат замкнутые пространственно-временные кривые шагового цикла каждой ноги; блока линейного преобразования координат, который обеспечивает геометрическую привязку шаговых циклов к корпусу и конечностям аппарата и их масштабирование; блока маневрирования, который по командам от верхнего уровня деформирует шаговые циклы ног так, чтобы обеспечить требуемое пространственное положение корпуса аппарата; блока преобразователей декартовых координат концов ног в угловые координаты звеньев ног, который состоит из шести идентичных нелинейных трехмерных следящих систем, обеспечивающих формирование сигналов на входы блока усилителей следящих систем, а также учет границ рабочих зон ног.
Блочное построение системы управления с относительно небольшим числом каналов связи блоков друг с другом обеспечивает удобство работы с системой, позволяет вести настройку и проверку качества работы отдельных блоков, а также легко контролировать функционирование в целом.
История создания «многоногих» роботов
Однако не менее интересно вернуться к истории создания первых шагающих роботов. Существует несколько вариантов историй современных механизмов - обычная, которую мы изучаем по курсу физики, и неофициальная - история человеческих фантазий, которую можно проследить по множеству фантастических романов, кинофильмов, исторических материалов. И совсем не ясно, за какой из них - истина. Взять хотя бы рисунки Леонардо Да Винчи, по которым построили велосипед и вертолет, или произведения Жюля Верна, в которых присутствовало большое множество неизвестных его современникам устройств, ничего особенного на сегодняшний день не представляющих. И вы думаете, читая или смотря кинофильмы о роботах, киборгах, андроидах и прочих новомодных устройствах, их не увидят наши потомки? Отнюдь. Не так давно прошла новость о том, что в Японском Национальном институте современных промышленных наук и технологий (AIST) при сотрудничестве компании Kawada Industries был создан очередной робот человеческого типа. У него такой же рост (154 см) и вес (58 кг). Он может самостоятельно ходить, садиться, ложиться и вставать, и даже носить груз, правда, пока не слишком тяжелый - 6 кг. Но, как вы понимаете, это не предел. Поэтому весьма правдоподобным представляется появление в течение ближайших 10-20 лет первого человекоподобного существа с развитым искусственным интеллектом.
Но первыми кончено были идеи. На рисунке из XVIII века изображена машина, передвигающаяся с помощью ног и колес (авторство рисунка не установлено). Причем главным движущим механизмом являются именно ноги. Думается, это была традиционная для того времени идея, поскольку люди перемещались на телегах, каретах и т.п. И что первое придет в голову, если захочется модернизировать данный вид транспорта?
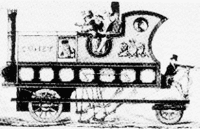
 Вторая, более знаменитая идея, принадлежит Джорджу
Муру (The Steam Man - 1893 год) - это был андроид образца XIX века. Правда,
реализоваться данный проект не смог, хотя и получил большую известность.
Вторая, более знаменитая идея, принадлежит Джорджу
Муру (The Steam Man - 1893 год) - это был андроид образца XIX века. Правда,
реализоваться данный проект не смог, хотя и получил большую известность.
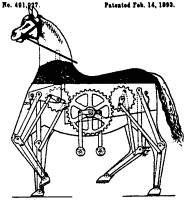
В 1983 году имела место еще одна очень интересная идея - совмещение лошади и велосипеда - The Mechanical Horse (рис.3). Принадлежит она Л. А. Риггу. Вслед за механизацией телеги или кареты изобретатель предложил модернизацию лошади. Интересно, почему проект заморозили?
И действительно, во время первой мировой войны данные футуристические идеи стали реализоваться. Первым стало появление уже сконструированного и собранного механизма Walking Machine, показанного на рисунке. Данная машина передвигалась только с помощью большого количества ног, работающих практически по принципу гусеничного механизма...
Другой вариант - это шагающий трактор, разработанный в это же время. Как мы можем видеть, сзади у механизма находятся две шагающие ноги, приводящие механизм в движение, а спереди - колеса. Получается телега наоборот. Это была первая реализация сочетания механических ног и колес в одной.
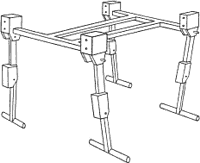
На какое-то время в истории шагающих машин наступило затишье вплоть до технологического прорыва 60-70-х. На рисунке вы можете увидеть изобретение 1966 года, реализованное МакГи и Франком в университете Южной Калифорнии. К этому стоит добавить, что это первое изобретение подобного рода, предусматривающее компьютерное управление. Называется оно Phoney Poney.
В 1968 году Р. Мошер завершил работу над созданием настоящего четырехногого монстра с ручным управлением под названием General Electric Walking Truck. Кстати, его изображение можно часто увидеть на многих научных и околонаучных сайтах. Что интересно, у Phoney Poney, так же, как и у General Electric Walking Truck, было по четыре ноги.
В 1973 году целая команда советских ученых завершила работу над практической реализацией шестиногой машины (доктор наук, профессор В.С. Гурфункель, доктор наук А. Ю. Шнейдер, доктор Е.В. Гурфункель и коллеги).
1977 год был весьма урожайным на всевозможные реализации шагающих роботов. Началось своего рода соревнование между США и СССР, что было нормально для того времени. С американской стороны выступал тот же МакГи со своей командой, с советской - профессор Гурфункель и коллеги. Причем русские "шестиноги" назывались очень просто - "Маша". Их мы можем увидеть на рисунках.
В ответ на "Машу" МакГи и команда предложили свою версию шестиногого робота, которая весила всего... 136 кг.
