

 Реферат: Применение метода ветвей и границ для задач календарного планирования
Реферат: Применение метода ветвей и границ для задач календарного планирования
Z=3x1+x2→max
при ограничениях:
![]() 4xl + Зх2 < 18
4xl + Зх2 < 18
x1 + 2x2 £ 6
0 £ x1 £ 4
0 £ x2 £ 0
х1, x2 — целые числа.
Задача 5
Z=3x1+x2→max
![]() при ограничениях:
при ограничениях:
4xl + Зх2 < 18
x1 + 2x2 £ 6
0 £ x1 £ 4
1 £ x2 £ 4
х1, x2 — целые числа.
Список задач: 4 и 5. Значение Z0 = 0.
IV этап. Решаем задачу 4 симплексным методом.
Получим Zmax = 12 при X4* = (4; 0; 2; 2; 0; 0). Задачу исключаем из списка, но при этом меняем Z0; Z0 = Z(X4*) = 12, ибо план Х4* целочисленный.
V этап. Решаем задачу 5 симплексным методом.
Получим Zmax = 12,25 при X5* = (3,75; 1; 0; 0,25; 0,25; 0; 3). Z 0 не меняется, т.е. Z0 = 12, ибо план X5* нецелочисленный. Так как х1* — дробное, из области решений исключаем полосу 3<x1<4, и задача 5 разбивается на две задачи: 6 и 7.
Задача 6
Z=3x1+x2→max
при ограничениях:
![]() 4xl + Зх2 < 18
4xl + Зх2 < 18
x1 + 2x2 £ 6
0 £ x1 £ 3
1 £ x2 £ 4
х1, x2 — целые числа.
Задача 7
Z=3x1+x2→max
![]() при ограничениях:
при ограничениях:
4xl + Зх2 < 18
x1 + 2x2 £ 6
4 £ x1 £ 4
1 £ x2 £ 4
х1, x2 — целые числа.
Список задач: 6 и 7. Значение Z0 = 12.
VI этап. Решаем одну из задач списка, например задачу 7, симплексным методом.
Получим, что условия задачи 7 противоречивы.
VII этап. Решаем задачу 6 симплексным методом.
Получим Zmax = 10,5 ,при X6* = (3; 1,5; 1,5; 0; 0; 0,5; 2,5).
Так какZ(X6*) = 10,5 < Z0 = 12, то задача исключается из списка.
Итак, список задач исчерпан и оптимальным целочисленным решением исходной задачи будет X* = Х4* = (4; 0; 2; 2; 0; 0), а оптимум линейной функции Zmax = 12
 Замечание 1. Нетрудно видеть, что каждая последующая задача,
составляемая в процессе применения метода ветвей и границ, отличается от
предыдущей лишь одним неравенством — ограничением. Поэтому при решении каждой
последующей задачи нет смысла решать ее симплексным методом с самого начала (с
I шага). А целесообразнее начать решение с последнего шага (итерации)
предыдущей задачи, из системы ограничений которой исключить "старые"
(одно или два) уравнения — ограничения и ввести в эту систему "новые"
уравнения — ограничения.
Замечание 1. Нетрудно видеть, что каждая последующая задача,
составляемая в процессе применения метода ветвей и границ, отличается от
предыдущей лишь одним неравенством — ограничением. Поэтому при решении каждой
последующей задачи нет смысла решать ее симплексным методом с самого начала (с
I шага). А целесообразнее начать решение с последнего шага (итерации)
предыдущей задачи, из системы ограничений которой исключить "старые"
(одно или два) уравнения — ограничения и ввести в эту систему "новые"
уравнения — ограничения.
3.Применение метода ветвей и границ для задач календарного планирования
Метод ветвей и границ является универсальным методом решения комбинаторных задач дискретного программирования. Сложность практического применения метода заключается в трудностях нахождения способа ветвления множества на подмножества и вычисления соответствующих оценок, которые зависят от специфики конкретной задачи.
Рассмотрим применение разновидности метода ветвей и границ— метода «последовательного конструирования и анализа вариантов» для решения задачи календарного планирования трех станков.
Заданы п деталей di (i = 1, 2, ..., n), последовательно обрабатываемых на трех станках R1, R2, R3, причем технологические маршруты всех деталей одинаковы. Обозначим ai ,bi ,ci — длительность обработки деталей di на первом, втором и третьем станках соответственно.
Определить такую очередность запуска деталей в обработку, при которой минимизируется суммарное время завершения всех работ Tц.
Можно показать, что в задаче трех станков очередность выполнения первых, вторых и третьих операций в оптимальном решении может быть одинаковой (для четырех станков это свойство уже не выполняется). Поэтому достаточно определить очередность запуска только на одном станке (например, третьем).
Обозначим sk = (i1, i2 , ..., ik) — некоторую последовательность очередности запуска длиной k (1 £ k £ п) и A (sk), В (sk), С (sk) — время окончания обработки последовательности деталей sk на первом, втором и третьем станках соответственно.
Необходимо найти такую последовательность sопт, что
С(sопт) = min С (s).
s
Покажем, как можно рекуррентно вычислять A (sk), В (sk), С (sk). Пусть sk+1 = (sk ,ik+i), т. е. последовательность деталей sk+1 получена из деталей sk с добавлением еще одной детали ik+1. Тогда
A (sk+1) = A (sk)+![]() ,
,
В (sk+1) = max [A (sk+1); В (sk)] + ![]() ,
,
С (sk+1) = max [В (sk+1); С (sk)] +![]()
Для задачи трех станков можно использовать следующее правило доминирования .
Если
s — некоторая
начальная последовательность, а ![]() — под
последовательность образованная из s перестановкой некоторых
символов, то вариант s доминирует над
— под
последовательность образованная из s перестановкой некоторых
символов, то вариант s доминирует над ![]() , когда выполняются следующие неравенства:
, когда выполняются следующие неравенства:
А (s) £ А (![]() ),
В (s) £ В (
),
В (s) £ В (![]() ),
С (s) £ С (
),
С (s) £ С (![]() ),
),
причем хотя бы одно из них выполняется как строгое неравенство.
Способ конструирования вариантов после-
довательностей s и вычисления оценок D(s) для каждого из них состоит в следующем.
Пусть имеется начальная подпоследовательность s. Тогда вычисляются величины:
dC(s) = С(s) +![]() , (1)
, (1)
dB(s) = В (s) +![]() + min cj , (2)
+ min cj , (2)
dA(s) = A (s) +![]() +
+ ![]() (3)
(3)
где J (s) — множество символов, образующих последовательность s.
За оценку критерия С (s) для варианта s можно принять величину
D(s) = max {dA(s), dB (s), dC (s)}. (4)
Тогда ход решения задачи трех станков можно представить следующей формальной схемой.
Нулевой шаг. Задание множества G(0), образуется всеми возможными последовательностями (s = 0).
Вычисление оценки для множества G0:
где D(0) = max {dA(0), dB (0), бC (0)},
![]() ;
; ![]() ;
; ![]() .
.
Первый шаг.Образование множеств G1(1) U G1(2) U... …G1(n).
Подмножество Gk определяется всеми последовательностями с началом ik(k — 1, ...,n ).
![]() Вычисление оценок. Оценку для последовательности sk определяют из соотношения (4), т. е.
Вычисление оценок. Оценку для последовательности sk определяют из соотношения (4), т. е.
D(sk) = max {dA(sk), dB (sk), dC (sk)}; k = 1, n.
Выбор варианта для продолжения. Из всех подпоследовательностей, построенных на предыдущем шаге, выбирают наиболее перспективную последовательность sk с наименьшей оценкой, т. е.
D(sk(1))=min D(sj(1)).
Ветвление. Выбрав наиболее перспективный вариант последовательности sk(1), развивают его построением всех возможных подпоследовательностей длиной 2 с началом sk(1) вида sk+1(2)= (sk(1), j), где j не входит в sk.
Вычисление оценок производят в соответствии с соотношениями (1), (2), (3).
k - ш а г. Допустим, что уже проведено k шагов, в результате чего построены варианты s1(k), s2(k) ,…,svk(k), а именно подпоследовательности длиной k.
Выбираем самый перспективный вариант sS(k) такой, что
D(ss(k))=min D(sj(k)).
Множество Gs(k)
разбиваем на (п — k) подмножеств, каждое из которых образуется
добавлением к последовательности ss(k) некоторого элемента ik+1 такого, что ik+1![]() .
.
Оценка ![]() определяется в соответствии с
соотношениями (1) — (4).
определяется в соответствии с
соотношениями (1) — (4).
В результате строим дерево вариантов следующего вида: вершина О отвечает s = 0, вершины первого уровня G1(1), G2(1)..., Gn(1) соответствуют последовательностям длиной 1, т. е. s1(1) = 1, s2(1) = 2,..., sn(1) = п и т. д. Каждая конечная вершина отвечает последовательности максимальной длины п.
Признак
оптимальности. Если sv(n) отвечает
конечной вершине дерева, причем оценка ![]() наименьшая из оценок всех вершин, то sv(n) —
искомый вариант, иначе переходим к продолжению варианта с наименьшей оценкой.
наименьшая из оценок всех вершин, то sv(n) —
искомый вариант, иначе переходим к продолжению варианта с наименьшей оценкой.
Пример 6. Рассмотрим задачу .трех станков, условия которой приведены в табл. 1:
Таблица 1
| Длительность операций | Деталь | ||||
| 1 | 2 | 3 | 4 | 5 | |
|
ai bi ci |
2 3 4 |
5 2 4 |
1 1 2 |
3 4 2 |
3 5 2 |
Нулевой шаг. s = 0.
dA(s =
0) = A(0) + ![]() +
+
![]() = 0 + 14 + 3 = 17;
= 0 + 14 + 3 = 17;
dB(s = 0) = В(0) + ![]() +
min cj = 0 + 15 + 2 = 17;
+
min cj = 0 + 15 + 2 = 17;
dC(s = 0) = С(0) + ![]() =14 .
=14 .
Тогда
∆ (s = 0) = max {17, 17,14} = 17.
Первый шаг. Конструируем все возможные последовательности длиной 1
s1(1) = 1; s2(1) = 2; s3(1) = 3; s4(1) = 4; s5(1) = 5.
Находим
dA(1) = A1 + ![]() +
+ ![]() = 14 + 3 = 17;
= 14 + 3 = 17;
dB(1)(s =
0) = В1 + ![]() +
+ ![]() = 5 + 12 + 2
= 19;
= 5 + 12 + 2
= 19;
dC(1) = С1 + ![]() = 9 + 10 = 19 .
= 9 + 10 = 19 .
Откуда ∆ (1) = max {17, 19, 19} = 19.
Аналогично определяем ∆ (2), ∆ (3), ∆ (4), ∆ (5).

Второй шаг. Среди множества подпоследовательностей длиной 1, s1(1) = 1, s2(1) = 2,..., s5(1) = 5 выбираем наиболее перспективную s = 1, для которой величина оценки-прогноза ∆ (s) оказывается наименьшей. Далее развиваем ее, конструируя возможные варианты длиной 2, т. е. (1.2), (1.3), (1.4), (1.5).
Для каждого из этих вариантов вновь определяем оценки по формулам (1) — (4).
Процесс вычислений продолжаем аналогично.
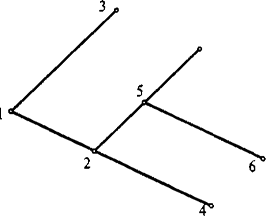
Процесс построения дерева вариантов приведен на рис. 1.
Каждой конечной вершине дерева вариантов будет отвечать полная последовательность s = i1,i2,,.in. Если для некоторой такой вершины величина оценки ∆ (s) не превосходит величины оценок для всех остальных вершин, то эта оценка определяет искомый оптимальный вариант. В противном случае разбиваем более перспективный вариант с наилучшей оценкой.
Конечная
вершина определяет вариант (последовательность) ![]() =
3, 1, 5, 2, 4 с наилучшей оценкой ∆ = 20. Поэтому данный вариант
является оптимальным.
=
3, 1, 5, 2, 4 с наилучшей оценкой ∆ = 20. Поэтому данный вариант
является оптимальным.
Непосредственной проверкой убеждаемся, что время обработки всей последовательности деталей для этого варианта совпадает со значением оценки-прогноза и является минимальным:
![]()
Летература
1)Зайченко Ю. П., «Исследование операций», Киев «Высшая школа» 1975г.
2)Акулич И.Л., «Математическое программирование в примерах и задачах», Москва «В ысшая школа» 1993г.
3)Кузнецов Ю.Н., Кузубов В.И., Волощенко А.Б. «Математическое программирование», Москва «В ысшая школа» 1980г.
