

 Реферат: Нейросетевая реализация системы
Реферат: Нейросетевая реализация системы
Определение 2.1. (Конечный) автомат Мура есть
пятерка А = (Z, X, Y, f, h). Здесь Z
– множество состояний, X – множество входов, Y – множество
выходов, f – функция переходов, ![]() и
h –функция выходов,
и
h –функция выходов, ![]() -
сюръективное отображение.
-
сюръективное отображение.
Автомат работает по следующему принципу. Если КА находится в
некотором состоянии ![]() , то выход
автомата определяется функцией выхода. Выход автомата интерпретируется в
данном случае как реакция среды, которая, возможно, с некоторыми
преобразованиями в блоке датчиков может быть подана на вход аппарата
формирования и распознавания образов как двоичный вектор. В каждый момент
времени автомат читает входное слово, которое интерпретируется как суммарное
воздействие со стороны УС и других внешних объектов. Множество входов может
быть шире чем множество допустимых воздействий на среду со стороны УС и
включать в себя слова или команды, которые могут подаваться со стохастических
источников, находящихся внутри среды. По прочитанному входному слову и
функции переходов определяется состояние в следующий момент времени.
, то выход
автомата определяется функцией выхода. Выход автомата интерпретируется в
данном случае как реакция среды, которая, возможно, с некоторыми
преобразованиями в блоке датчиков может быть подана на вход аппарата
формирования и распознавания образов как двоичный вектор. В каждый момент
времени автомат читает входное слово, которое интерпретируется как суммарное
воздействие со стороны УС и других внешних объектов. Множество входов может
быть шире чем множество допустимых воздействий на среду со стороны УС и
включать в себя слова или команды, которые могут подаваться со стохастических
источников, находящихся внутри среды. По прочитанному входному слову и
функции переходов определяется состояние в следующий момент времени.
Определение 2.2. (Конечный) модифицированный
недетерминированный автомат Рабина-Скотта (МНРС) есть семерка А = (Z,
X, T, S, F, h, p). Здесь Z и X
– конечные множества (состояний и входов соответственно; X называют
также входным алфавитом автомата А); ![]() (множества
начальных и финальных состояний соответственно);
(множества
начальных и финальных состояний соответственно); ![]() , где
, где ![]() ,
, ![]() (иначе говоря T –
многозначное отображение
(иначе говоря T –
многозначное отображение ![]() с
конечной областью определения); h – то же, что и для автомата Мура; p
– функция вероятности переходов,
с
конечной областью определения); h – то же, что и для автомата Мура; p
– функция вероятности переходов, ![]() ,
причем
,
причем
![]() . (2.1)
. (2.1)
Отметим, что мы рассматриваем только неалфавитные
МНРС, т.е. КА, у которых нет переходов для пустого слова ![]() :
: ![]() , а, следовательно, нет и спонтанных
переходов. Отличительной особенностью МНРС является неоднозначность
переходов или возможность соответствия одной и той же паре состояние - входное
слово нескольких переходов и приписанной каждому переходу вероятности. Условие
(2.1) означает, что сумма вероятностей всех переходов из любого состояния есть
1.
, а, следовательно, нет и спонтанных
переходов. Отличительной особенностью МНРС является неоднозначность
переходов или возможность соответствия одной и той же паре состояние - входное
слово нескольких переходов и приписанной каждому переходу вероятности. Условие
(2.1) означает, что сумма вероятностей всех переходов из любого состояния есть
1.
Отличие принципа действия МНРС от автомата Мура состоит в том, что, когда автомат находится в некотором состоянии и прочел входное слово, то реализуется один из возможных из данного состояния и при данном входном слове переход, при этом вероятность реализации перехода определяется функцией p.
Приведенные две модели среды с двумя разными КА не являются эквивалентными и задают разные модели поведения. Очевидно, что любая модель с автоматом Мура может быть смоделирована моделью с МНРС, причем обратное утверждение для любой модели неверно. Автомат Мура проще в реализации и исследованиях, а с помощью МНРС можно построить более точную модель среды.
3. Аппарат формирования и распознавания образов.
3.1. Биологический нейрон.
На рис. 3.1.1, взятом из [Turchin] представлен в упрощенном виде биологический нейрон. Схематично его можно разделить на три части: тело клетки, содержащее ядро и клеточную протоплазму; дендриты – древовидные отростки, служащие входами нейрона; аксон, или нервное волокно, - единственный выход нейрона, представляющий собой длинный цилиндрический отросток, ветвящийся на конце. Для описания формальной модели нейрона выделим следующие факты:
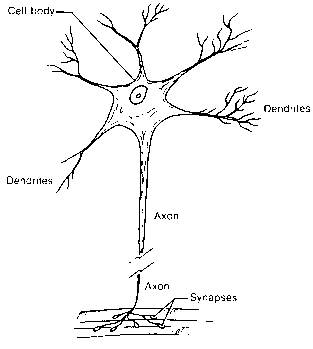
Рис. 3.1.1
В любой момент возможны лишь два состояния волокна: наличие импульса и его отсутствие, так называемый закон “все или ничего”.
Передача выходного сигнала с аксона предыдущего нейрона на дендриты или прямо на тело следующего нейрона осуществляется в специальных образованиях – синапсах. Входные сигналы суммируются с синаптическими задержками и в зависимости от суммарного потенциала генерируется либо нет выходной импульс – спайк.
3.2. Формальная модель нейрона.
Впервые формальная логическая модель нейрона была введена Маккалоком и Питтсом в 1948 году [Маккалок] и с тех пор было предложено огромное количество моделей. Но все они предназначены для решения в основном задач распознавания и классификации образов. Можно указать целый ряд основных отличий предлагаемой в данной работе модели и уже существующих. Во-первых, в классических моделях всегда присутствует “учитель” или “супервизор”, подстраивающий параметры сети по определенному алгоритму, предлагаемый же нейрон должен подстраиваться “сам” в зависимости от “увиденной” им последовательности входных векторов. Формально говоря, при работе нейрона должна использоваться только информация с его входов. Во-вторых, в предложенной модели нет вещественных весов и взвешенной суммации по этим весам, что является большим плюсом при создании нейрочипа и модельных вычислениях, поскольку целочисленная арифметика выполняется всегда быстрее, чем рациональная и проще в реализации. Главное же отличие предлагаемой модели состоит в цели применения. C помощью нее решаются все задачи управляющей системы: формирование и распознавание образов (ФРО), распознавание и запоминание закономерностей (БЗ), анализ информации БЗ и выбор действий (БПР), в отличии от классических моделей, где решается только первая задача.
Важной задачей ФРО для автономных систем также является не только распознавание образов, но и их хранение или запоминание. Это следует из автономности системы, т.к. для неавтономных систем распознанные образы могут храниться и использоваться вне системы. Вообще говоря, проблему запоминания можно решить множеством способов. Например, один из известных способов – организовать кольцо из нейронов, в котором сигнал мог бы прецессировать до бесконечности или в течении некоторого времени в случае затухания. В последнем случае система приобретает новое полезное свойство “забывчивости”, которое, как известно, присуще биологическим системам и позволяет более рационально и экономно использовать ресурсы, т.к. ненужная или малоиспользуемая информация просто “забывается”. Эксперименты проводились с формальной моделью без памяти, но очевидно, что она нужна. Нами предлагается ввести так называемую синаптическую память, т.е. способность запоминать входной сигнал в синаптическом блоке.
В данной работе мы используем нейрон из [Жданов2], который модифицирован в соответствии с [Братищев]. Мы приведем лишь краткое описание. На рис. 3.2.1 представлена блочная схема предлагаемой формальной модели нейрона. Входы нейрона xit подаются на блоки задержки Di для задержки сигнала на время Di , а затем на триггерные элементы Ti для удлинения сигнала на величину ti . Данные элементы обеспечивают некоторую неопределенность момента поступления входного сигнала по отношению к моменту генерации выходного спайка и образуют таким образом синаптическую память, поскольку входной сигнал запоминается в этих элементах на некоторое время.
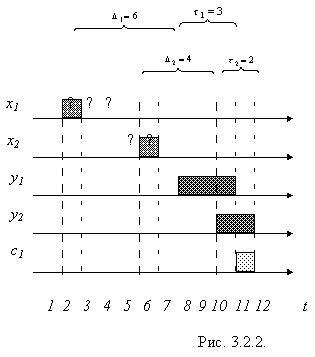
С учетом задержек Di и ti получаем, что, если на выходе обученного нейрона в момент t появился единичный сигнал, то единичные импульсы на входы нейрона поступили в интервалы времени di = [ t - ti - Di ; t - Di -1]. Неопределенность моментов поступления входных импульсов будет тем меньше, чем меньше задержки ti.
Пример временной диаграммы работы обученного нейрона с двумя входами и с заданными задержками Di и ti иллюстрирует рис. 3.2.2. Вопросительными знаками показаны неопределенности моментов прихода входных импульсов, соответствующие интервалам di.
Различное отношение и расположение задержек Di и ti во времени наделяет нейрон возможностями формирования и распознавания образов следующих видов.
Если ![]() , то
имеем пространственный образ. Например, образ некоторой геометрической фигуры.
, то
имеем пространственный образ. Например, образ некоторой геометрической фигуры.
Если ![]() , то
имеем образ следования (важен порядок следования образующих, допустима
неопределенность в конкретных моментах прихода импульсов). Примером может быть
распознавание слов при чтении по буквам.
, то
имеем образ следования (важен порядок следования образующих, допустима
неопределенность в конкретных моментах прихода импульсов). Примером может быть
распознавание слов при чтении по буквам.
Если " ti = 1, то имеем пространственно-временной образ (ПВО), в этом случае однозначно определено, по каким входам и в какие моменты времени приходили сигналы. Примером может быть распознавание музыкального тона определенной высоты.
Элемент lw предназначен для набора статистики по данному пространственно-временному образу. Значение lw=1 указывает на то, что данный нейрон обучен.
Задержки Di и ti заданы изначально, т.е. являются константными параметрами нейрона. Если поступающая на данный нейрон последовательность сигналов содержит закономерность, описываемую такими временными параметрами, то нейрон сформирует образ такого пространственно-временного прообраза. Очевидно, что необходимое число нейронов такого типа в сети будет тем меньше, чем больше априорной информации о временных характеристиках прообразов известно на стадии синтеза сети.
Страницы: 1, 2, 3, 4, 5, 6, 7, 8
