

 Реферат: Моделирование линейных непрерывных систем в среде LabVIEW
Реферат: Моделирование линейных непрерывных систем в среде LabVIEW
Видим, что одно и то же аналоговое устройство может описываться отличающимися дискретными передаточными функциями.
В таблице 1 была приведена дискретная передаточная функция интегрирующей цепи (для которой К (р) = 1/ (1 + рТ)), полученной применением Z-преобразования. Найдем другие варианты дискретной передаточной функции интегрирующей цепи, отличающиеся методами численного интегрирования.
При использовании метода прямоугольников (1) в передаточную функцию K (p) = 1/ (1 + pT) вместо р нужно подставить (z - 1) /Δt. Тогда получим
|
![]() K (z) = 1/ (1 + (z - 1) T/Δt)
=.
K (z) = 1/ (1 + (z - 1) T/Δt)
=.
Аналогично можно получить дискретные передаточные функции и для других методов численного интегрирования. Они представлены в таблице 3 Принято обозначение Δt/T = α
Таблица 3
| Метод |
K (z) |
|
Z-преобразование |
α z
|
| Метод прямоугольников (1) |
α
|
| Метод прямоугольников (2) |
(α/ (1 + α)) z
|
| Метод трапеций |
(α / (2 + α)) (z + 1)
|
Этим передаточным функциям соответствуют следующие рекуррентные формулы.
Для Z-преобразования
yk = e-αyk - 1 + αxk. (7)
Для численного интегрирования по методу прямоугольников (1)
yk = (1 - α) yk - 1 + αxk - 1.
Полученная формула совпадает с формулой для прямого метода Эйлера
Для численного интегрирования по методу прямоугольников (2)
yk = (1/ (1 + α)) yk - 1 + (α/ (1 + α)) xk. (8)
и по методу трапеций
yk = ( (2 - α) / (2 + α)) yk - 1 + (α/ (2 + α)) (xk + xk - 1). (9)
В лабораторной работе производится оценка ошибок цифрового моделирования для каждого из этих методов.
Моделирование линейных замкнутых системНужно быть очень внимательным при выборе интервала дискретизации, когда моделируются замкнутые системы. В этих системах текущее значение входного процесса сравнивается со значением выходного процесса, рассчитанного по предыдущим значениям входного процесса. Это экстраполированное значение не должно значительно отличаться от входного процесса.
В противном случае возникают большие ошибки моделирования, а при большом интервале дискретизации процесс может стать неустойчивым. Выбор интервала дискретизации нужно связывать с полосой пропускания замкнутой системы.
Проводя аналогию с теоремой Котельникова, можно потребовать, чтобы Δf0,1Δt = 5 - 10, где Δf0,1 - полоса пропускания замкнутой системы по уровню 0,1.
Рассмотрим моделирование непрерывной замкнутой системы на конкретном примере, когда передаточная функция разомкнутой системы
|
Такая модель часто используется при анализе ошибок в следящей системе.
Запишем дискретную передаточную функцию разомкнутой системы, заменяя интеграторы по методу прямоугольников (2). Для этого преобразуем передаточную функцию разомкнутой системы (5.10), поделив числитель и знаменатель на р2:
|
![]() Кр
(р) =.
Кр
(р) =.
Используя соотношения, приведенные в таблице (5.2), получим:
|
|
![]()
![]() Кр
(z) =
=, (11)
Кр
(z) =
=, (11)
где b1 = K (Δt) 2/ (T + Δt), a1 = - (2T + Δt) / (T + Δt), a2 = T/ (T + Δt).
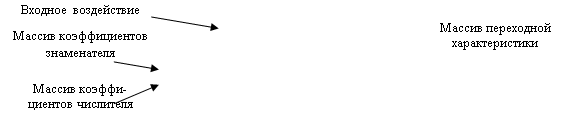
Для моделирования устройства с передаточной функцией (11) используется БИХ-фильтр, коэффициенты числителя которого (Forward Coefficients) представляются массивом из двух элементов (0,b1), а коэффициенты знаменателя - массивом из трех элементов (1, a1,a2).
Специфика использования БИХ-фильтра заключается в том, что неизвестен целиком входной массив Х, а известен только текущий элемент, а следующий элемент рассчитывается с учетом значения текущего элемента выходного массива фильтра. В LabVIEW существует такой фильтр - IIR Filter PtByPt (IIR Filter Point By Point - БИХ-фильтр точка за точкой).
|
|
| Рис.6 |
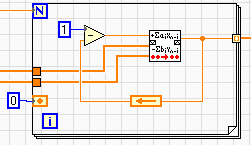
Вычисления БИХ-фильтром IIR Filter PtByPt производятся в цикле For
Loop (рис.5.6). В этом же цикле генерируется единичное входное воздействие. Автоматическое появление в цепи обратной связи регистра сдвига обусловлено тем, что рассчитанное значение выходного процесса используется для сравнения с входным только в следующем интервале дискретизации, то есть с запаздыванием на интервал дискретизации. В результате вычислений формируется массив переходной характеристики.
Для точного расчета переходной характеристики воспользуемся ВП ODE Linear nth Order Numeric - “Решение линейного обыкновенного дифференциального уравнения n-го порядка в численном виде” (рис.7).
|
|
| Рис.7 |
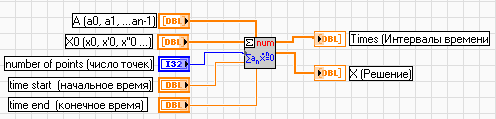
ВП находит решение в виде суммы экспонент и вычисляет его для заданных точек. Поэтому решение точное.
Вход А представляет собой массив коэффициентов дифференциального уравнения в порядке увеличения степени производной. Коэффициент при производной самой высокой степени считается равным 1 и не требует ввода.
На вход Х0 подается массив начальных условий - начальные значения решения и его n - 1 - й производных.
Вход “число точек" задает число равноудаленных по времени точек между начальным и конечным временем
Выход Х содержит массив значений решения в равномерно расположенных по оси времени точках. Значение времени в этих точках выводится в массиве Times.
Дифференциальное уравнение замкнутой системы запишем по передаточной функции замкнутой системы:
|
|
![]()
![]() Кз
(р) = = (12)
Кз
(р) = = (12)
Дифференциальное уравнение замкнутой системы
Td2y/dt2 + dy/dt + Ky = Kx
Запишем однородное дифференциальное уравнение, учитывая, что коэффициент при высшей производной должен быть равен 1
d2y/dt2 + (1/Т) dy/dt + (K/Т) y = 0
Для компьютерного решения этого уравнения нужно задать массив А = (К/Т, 1/Т). Чтобы получить переходную характеристику, нужно задать массив Х = ( - 1, 0) и к решению прибавить 1.
Полностью блок-схема программы моделирования замкнутой системы приведена на рис.8.
|
|
|
|
|

Рис.8
Заключение
В основе технологии использования LabVIEW лежит комбинированное моделирование систем на ЭВМ, включающее аналитическое, имитационное и натурное.
Для аналитического моделирования характерно то, что алгоритм функционирования системы записывается в виде некоторых аналитических соотношений (алгебраических, интегро-дифференциальных, конечно - разностных и т.п.) или логических условий. При имитационном моделировании алгоритм функционирования системы воспроизводится во времени с сохранением логической структуры и последовательности протекания элементарных явлений, составляющих процесс. В настоящее время имитационное моделирование - наиболее эффективный метод исследования систем, а часто и единственный практически доступный метод получения информации о поведении системы, особенно на этапе ее проектирования.
Натурным моделированием называют проведение исследования на реальном объекте с возможностью вмешательства человека в процесс проведения эксперимента и последующей обработки результатов эксперимента на вычислительной технике.
Отличие модельного эксперимента от реального заключается в том, что в модельном эксперименте могут быть реализованы любые ситуации, в том числе "невозможные" и аварийные, что в силу разных причин бывает недопустимо при работе с реальными объектами. Все представленные виды моделирования могут быть реализованы с использованием системы программирования LabVIEW.
Список литературы
1. Н.А. Виноградова, Я.И. Листратов, Е.В. Свиридов. "Разработка прикладного программного обеспечения в среде LabVIEW". Учебное пособие - М.: Издательство МЭИ, 2005.
2. http://www.automationlabs.ru/
3. http://digital. ni.com/
4. http://www.labview.ru/
5. http://ru. wikipedia.org/
