

 Реферат: Контроллер промышленного назначения
Реферат: Контроллер промышленного назначения
Реферат: Контроллер промышленного назначения
Разработка устройства логического управления (контроллера) промышленного назначения
Введение.
В данном курсовом проекте поставлена задача разработать некий промышленный контроллер для работы в условиях производства. Задача может быть выполнена на микропроцессоре с гибкой программируемой логикой, а также на дискретных элементах с жесткой логикой.
Реализация на микропроцессоре обладает весомыми преимуществами. Гибкая логика, возможность легкой модернизации контроллера, перспективность.
Программируемая логика реализована на микропроцессоре типа МК-51 фирмы ATMEL – AT89C51, который благодаря встроенной FLASH памяти, обладает возможностью электрического перепрограммирования, а значит быстрой модернизации управляющей программы.
Наличие микропроцессора в современных контроллерах позволяет создавать сложные, гибкие, компактные и надежные системы управления с централизованным управлением и диагностикой.
Структурный синтез цифрового автомата
Обозначим структуру проектируемого микроконтроллера.
Управляющий логический блок на основе микропроцессора.
Блок сбора информации и преобразования ее в вид, требуемый для обработки микропроцессором.
Блок гальванической развязки входных сигналов и сигналов, поступающих на микропроцессор.
Блок связи с исполнительными устройствами (включающий гальваническую развязку) для преобразования выходных сигналов микропроцессора в мощные сигналы управления.
Блок начального сброса микропроцессора.
Блок индикации входных и выходных сигналов.
Блок электропитания контроллера.
2. Разработка принципиальной схемы.
1. Управляющий логический блок.
В качестве основы для контроллера выбран популярный микропроцессор типа MK-51 от фирмы Atmel – AT89C51.
Его основные преимущества перед подобными процессорами иных фирм:
Полностью совместим с семейством МК-51.
4 кб встроенной перепрограммируемой Flash памяти (включая перепрограммирование непосредственно на плате по протоколу SPI) при не менее 103 циклов перезаписи.
Работа на частотах от 0 до 40 МГц.
128х8 бит ОЗУ.
32 программируемых линии портов ввода/вывода.
Два 16-битных таймера счетчика
Шесть источников прерываний
Программируемый последовательный канал совместимый с RS-232-S.
2. Блок сбора информации и преобразования ее в вид, пригодный для обработки микропроцессором.
Входная информация и выходная информация проходит через внешний разъем типа РШ2Н-2-16.
В таблице 1 приведен список и условное обозначение входных и выходных сигналов из задания.
Табл. 1.
|
Наименование сигнала по заданию |
Присвоенное название |
|
Входные сигналы |
|
| S1 - контактный датчик | S1 |
| S2 – контактный датчик | S2 |
| S3 – контактный датчик | S3 |
| Ua - Аналоговый сигнал напряжения в диапазоне 0..10В | UA |
| Ev – датчик освещенности 0..200лк | EV |
|
Выходные сигналы |
|
| Электромагнит Y1 | Y1 |
| Электромагнит Y2 | Y2 |
| Тр. Модуль – VT1 | Y3 |
| Тр. Модуль – VT2 | Y4 |
|
Условия переходов автомата |
|
| S1 Ú U < 7 B | X1 |
| EV < 40 лк | X2 |
|
(S1 Ú S2) Ú U > 1 B |
X3 |
| S3 ^ EV < 50 лк | X4 |
| S2 ^ U < 3 B | X5 |
| EV > 100 лк | X6 |
Сигнал с датчика освещенности (фоторезистора СФ2-1) снимаем по такой схеме:
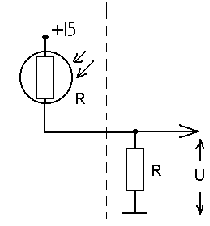
Далее сигнал поступает на делительный мост из резисторов, формирующий нужный уровень сигнала, подаваемый на схему из двух компараторов. На не инвертирующий вход компаратора подается измеряемая величина напряжения, а на инвертирующий – величина опорного напряжения, при достижении которой значение логического сигнала на выходе компаратора меняется на противоположное. Срабатывание при нужном значении освещенности регулируется подстроечными резисторы марки РП1 – 48 10КОм±10%.
Компаратор LM29000.
Его электрические характеристики:
Максимальный потребляемый ток 2 мА.
Напряжение смещения 1 мВ.
Корпус DIP-14.
Для организации высокостабильного опорного напряжения выбраны специализированная микросхема LM4130 фирмы National Semiconductor.
Выходное опорное напряжение 4.096 В
Погрешность выходного напряжения 0.05%
Температурный коэффициент нестабильности 3*10-6/оС
Минимальное входное напряжение 5 В
Потребляемый ток 1 мА
Максимальный выходной ток 30-50 мА
Изменение выходного напряжения (при Iвых=30..50 мА) 0.05%
По такой же схеме организован прием и формирование логических сигналов UA на микропроцессор.
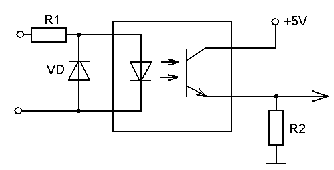
3. Блок гальванической развязки входных сигналов и сигналов, поступающих на микропроцессор.
Входные величины поступают из внешней (для контроллера) среды, что говорит о возможном наличии помех различных типов. Так же необходимо предусмотреть возможность неправильной полярности подключения датчиков. Поэтому возникла необходимость в гальванической развязке сигналов.
Для того, чтобы развязать входные уровни микропроцессора и входных сигналов от датчиков применены три оптопары К249КН4П. Характеристики, по которым они были выбраны:
Uмахком=60 В;
Iвхmin=10 мА;
Iвхmax=25 мА;
Iком=8 мА.
Резисторы R1 и R2 рассчитываются из условий максимального входного и коммутируемого токов. Диод обеспечивает защиту от неправильной полярности включения.
Резисторы:
R1 C2 – 23 0.25Вт 1600 Ом±0.25%
R2 C2 – 23 0.125Вт 270 Ком±0.1%
Диод КД521А(Д220А):
Uпр=1В, Uобр=75В, Iпр.ср=50мА, Iобр=1мкА.
Обработка выходных величин: Электромагнит.
В данной работе автомат генерирует выходной сигнал управления электромагнитом (=24В, 10Вт). Данная мощность явно не позволяет подключать электромагнит непосредственно к выходу микропроцессора, поэтому здесь целесообразно применить мощные твердотельные оптоэлектронные реле. Мощность на выходе которых может достигать достаточно больших значений. В оптопаре одновременно реализуется гальваническая развязка силовой и управляющей цепей, а также усиление по мощности сигнала.
Схема подключений оптоэлектронного реле:
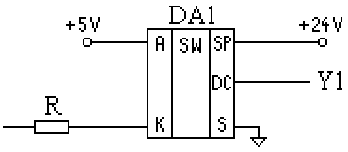
Твердотельное реле для цепей постоянного тока 5П19А1:
Напряжение коммутации -60..+60В
Ток коммутации -3..3А
Входной ток 10 – 25мА
Входное напряжение в выключенном состоянии -3.5..0.8 В
Рассеиваемая мощность 1000мВт
Температура окр. среды -45..+85
Корпус SIP12
Резистор:
R C2 – 23 0.125Вт 360 Ом±0.1%
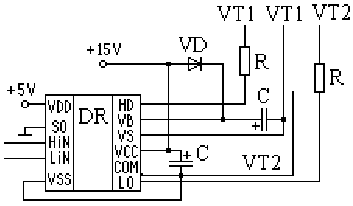
Транзисторный модуль
Транзисторный модуль М2ТКИ-50-12 управляется специализированным драйвером - драйвер транзисторных модулей такого типа - IR2112 фирмы International Rectifier. Драйвер способен выдерживать напряжения до 600 вольт. Схема включения приведена ниже:
Symbol Description
VDD Logic supply
HIN Logic input for high side gate driver output (HO), in phase
SD Logic input for shutdown
LIN Logic input for low side gate driver output (LO), in phase
V SS Logic ground
VB High side floating supply
HO High side gate drive output
V S High side floating supply return
VCC Low side supply
LO Low side gate drive output
COM Low side return
Диод VD должен выдержать обратное напряжение 600В.
Страницы: 1, 2
