

 Реферат: Фазовый и частотный методы измерения дальности
Реферат: Фазовый и частотный методы измерения дальности
Реферат: Фазовый и частотный методы измерения дальности
Министерство образования Российской Федерации
Казанский Государственный Технический Университет им. А.Н. Туполева
Реферат
По дисциплине:
«Основы радиотехнических систем»
На тему:
«Фазовый и частотный методы измерения дальности»
Выполнил ст. гр.5531
М.А. Лукьянов
Проверил
Р.В. Мнекин
Казань 2002
Содержание
I. Введение……………………………………………
II. Методы измерения дальности
1.Частотный метод радиодальнометрии…………
Сущность метода………………………………..
Реализация частотного метода дальнометрии...
2. Фазовые методы дальнометрии………………..
Общие сведения………………………………...
Фазовый радиодальномер с модуляцией
несущей………………………………………...
Двухчастотные фазовые дальномеры…………
III. Список использованной литературы……………..
Введение
Радиолокацией называется совокупность методов и технических средств, предназначенных для обнаружения различных объектов в пространстве, измерения их координат и параметров движения посредством приема и анализа электромагнитных волн, излучаемых или переизлучаемых объектами.
Радиолокация как научно-техническое направление в радиотехнике зародилось 30-х годах. Достижения авиационной техники обусловили необходимость разработки новых средств обнаружения самолетов, обладающих высокими характеристиками (дальностью, точностью). Такими средствами оказались радиолокационные системы.
Выдающийся вклад в развитие радиолокации внесли русские ученые и инженеры П.К. Ощепков, М.М. Лобанов, Ю.К. Коровин, Б.К. Шембель. В советском союзе первые успешные эксперименты обнаружения самолетов с помощью радиолокационных устройств были проведены еще в 1934/36 гг. В 1939 г. на вооружение войск ПВО поступили первые серийные отечественные радиолокаторы. Существенным шагом в развитии радиолокации было создание в 1940/41 гг. под руководством Ю.Б. Кобзарева импульсного радиолокатора. В настоящее время радиолокация одна из наиболее прогрессирующих областей радиотехники.
Получение информации в радиолокации сопряжено с наблюдением некоторой области пространства. Технические средства, с помощью которых ведется радиолокационное наблюдение, называются радиолокационными станциями (РЛС), а наблюдаемые объекты – радиолокационными целями. Типичными целями являются самолеты, ракеты, корабли, наземные инженерные сооружения.
В радиолокации наиболее часто измеряется дальность между целью и РЛС. Существуют импульсный, частотный и фазовый методы измерения дальности. Целью данной работы является описание частотного и фазового методов.
Данный документ содержит 7 рисунков. При написании реферата было использовано 4 источника литературы и ресурсы сети Internet.
Методы измерения дальности.
1. Частотный метод радиодальнометрии.
Сущность метода. Для этого метода характерно, что зондирующее излучение непрерывное и модулировано по частоте. Модуляция позволяет различать прямой и отраженный сигналы по разности их частот и тем самым не только обнаружить цель, но и измерить ее дальность.
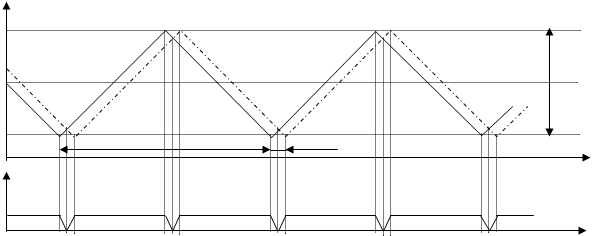
Частоту передатчика fпрд, естественно, нельзя неограниченно увеличивать или уменьшать. Ее изменяют по пилообразному или пилообразному (Рис.1) закону с частотой модуляции Fм=1/Тм. Девиацию, т.е. максимальное отклонение частоты, обозначим
Δfm=fmax-fmin.
Частота отраженного сигнала fотр повторяет частоту излученного сигнала fпрд с запаздыванием tд=2Д/с. Отсюда в один и тот же момент времени t разность частот прямого (fпрд) и отраженного (fотр) сигналов, т.е. частота биений
Fб=|νм|tд=2|νм|Д/с , (1)
где |νм| - скорость изменения частоты.
В один полупериод модуляции Тм/2 частота передатчика fпрд возрастает и скорость νм>0, а в другой полупериод – наоборот; вместе с тем частота Fд физически не может быть отрицательной величиной. Поэтому в формулу (1) введено абсолютное значение скорости
модуляции |νм|. При пилообразном законе эта скорость постоянная и равна частному от деления частоты Δfm на ее продолжительность Тм/2. Тогда формулу (1) можно представить в виде
Fб=2|νм|Д/с=4ΔfmД/сТм=4ΔfmFмД/с (2)
Величины Δfm, Fм и с – постоянные, а это значит, что в ЧМ дальномере измерение текущей дальности цели Д сводится к измерению разности частот Fб прямого и отраженного сигналов, причем Д и Fб связаны между собой прямо пропорциональной зависимостью. Отсюда происходит другое название величины Fб – частоты дальности.
Линейный закон изменения частоты Fб нарушается на участках протяженностью tд, в середине которых эта разностная частота проходит через нулевое значение. Однако, если максимальное запаздывание сигнала, которое фиксируется данной РЛС, значительно меньше периода модуляции
Временные диаграммы иллюстрирующие частотный метод измерения дальности
 |
|||
 |
|||
Рис.1
(tд max << Тм), то нарушением линейности можно пренебречь и считать формулу (2) справедливой для любого закона частотной модуляции. Соотношение tд max << Тм является также условием однозначного отсчета дальности.
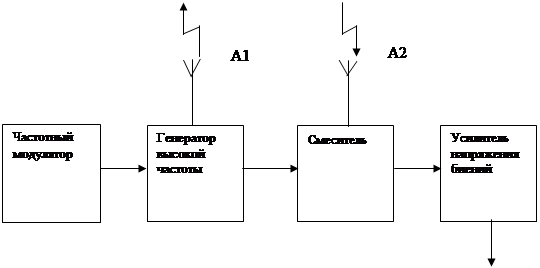
Реализация частотного метода дальнометрии. По способу обработки сигналов неследящие частотные измерители делятся на корреляционные, с фильтровой обработкой и с корреляционно-фильтровой. Третий вариант, наиболее простой в осуществлении, представлен функциональной схемой дальномера (Рис.2) и временными диаграммами (Рис.3).
Передающее устройство состоит из генератора высокой частоты, модулятора, изменяющего частоту генерируемых колебаний по пилообразному или синусоидальному закону, и передающей антенны А1. Первым каскадом приемника является смеситель, с которого начинается Корреляционно-фильтровая обработка: в смесителе перемножаются отраженный сигнал uотр(t), который подводится от приемной антенны А2, с опорным сигналом uпр(t), который подводится по короткому кабелю от передатчика; накопление энергии происходит в RC-фильтрах нижних частот, следующих за перемножителем. Как во всяком смесителе, перемножение происходит в нелинейном элементе и в результате образуются составляющие суммарной и разностной частот отраженного и опорного (прямого) сигналов. Сигнал с частотой биений пропускается к усилителю низкой частоты, а составляющие суммарных частот подавляются фильтрами нижних частот смесителя.
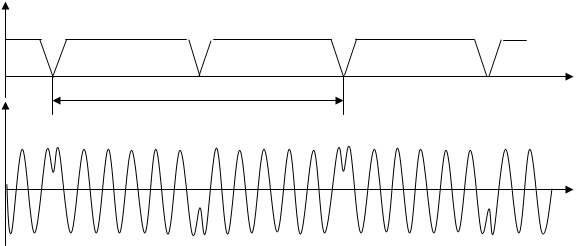
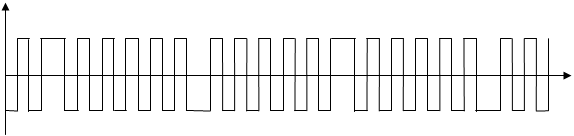
Как показывает временная диаграмма напряжения биений uб (Рис.3), когда частота его Fб отклоняется от своего основного значения, синусоидальность этого напряжения нарушается. Двухсторонний ограничитель амплитуды, следящий за усилителем низкой частоты, преобразует полученное несинусоидальное напряжение с периодом Тм в прямоугольные колебания uогр. Так называемый счетчик нулей определяет частоту биений Fб по числу переходов через нуль, которые совершают положительные перепады этих колебаний за период модуляции Тм. Переходы отмечены точками на временной диаграмме. Если число их Nm умножить на частоту модуляции Fм, то получится частота дальности, которую фиксирует индикатор
Fб= NmFм (3)
Если счетчик аналоговый (Рис.3), то выходное напряжение uсч постоянное, а если счетчик цифровой, то работа его сводится к подсчету эталонных импульсов, пропорциональных, как и напряжение uсч, частоте дальности. Очевидно, что индикатор при таком счетчике должен показывать дальность цели в цифровой форме.
В связи с тем, что счетчики подсчитывают число полных биений, показания частотного дальномера изменяются скачками. Наименьшая Функциональная схема частотного радиодальномера с корреляционно-фильтровой обработкой сигналов
 |
||
 |
||
Рис.2
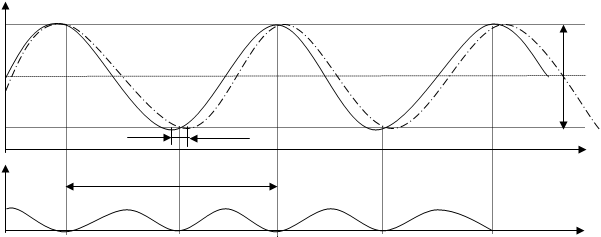
Временные диаграммы частоты биений и напряжений в измерителе частотного радиодальномера с корреляционно-фильтровой обработкой сигналов
 |
|||
 |
|||
 |
|||
Страницы: 1, 2
