

 Курсовая работа: Дискретное программирование
Курсовая работа: Дискретное программирование
В качестве существенного замечания по поводу метода Гомори следует добавить, что при его практической реализации на ЭВМ следует считаться с ошибками округления, т, к. в условиях машинной арифметики практически ни один план не будет целочисленным. Кроме того, накапливающиеся погрешности могут внести возмущения в алгоритм и "увести" от оптимального целочисленного плана.
4.3 Пример решения ЦЗЛП методом Гомори
Рассмотрим особенности применения метода Гомори на конкретном примере. Пусть дана задача со следующими условиями:
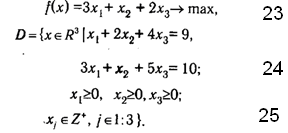
4.3.1 Итерация 1
Используя обычный симплекс-алгоритм, решаем непрерывный аналог исходной задачи, в котором игнорируются условия целочисленности 25. В качестве исходного базиса можно взять первый и второй столбцы. На его основе заполняется таблица T(1,1) (первый индекс в обозначении таблицы соответствует "большой" итерации, а второй — "малой").
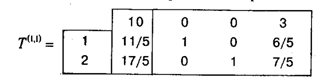
Как видно из строки оценок, данный базис является оптимальным, однако соответствующий ему план х ={11/5,17/5, 0) не является целочисленным, поэтому выбираем из таблицы T(1,1) строку, содержащую первый нецелый элемент, и согласно формуле 22 строим отсекающее ограничение:
![]()
после чего переходим к следующей "большой" итерации.
4.3.1 Итерация 2
С учетом сформированного отсекающего ограничения заполняем симплекс-таблицу T(2,1).
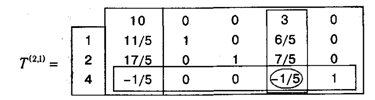
В соответствии с алгоритмом двойственного симплекс-метода переходим к следующему базису N(β(2,2))={1, 2, 3}.
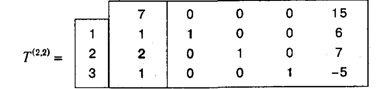
План, достигнутый в таблице T(2,2), является не только оптимальным (b(β(2,2))>0), но и полностью состоит из целочисленных компонент, т. е. решение задачи найдено: х* = (1, 2, 1) и f(x)=7.
5. Метод ветвей и границ
5.1 Общая схема метода "ветвей и границ"
Другим широко применяемым для решения задач дискретного программирования методом является метод ветвей и границ. Впервые данный метод для решения ЦЗЛП предложили в 1960 г. Лэнг и Дойг, а его "второе рождение" произошло в 1963 г. в связи с выходом работы Литтла, Мурти, Суини и Кэрел, посвященной решению задачи о коммивояжере [33].
Вообще говоря, термин "метод ветвей и границ" является собирательным и включает в себе целое семейство методов, применяемых для решения как линейных, так и нелинейных дискретных задач, объединяемое общими принципами. Кратко изложим их.
Пусть стоит задача: (*)
![]()
где D — конечное множество.
Алгоритм является итеративным, и на каждой итерации происходит работа с некоторым подмножеством множества D. Назовем это подмножество текущим и будем обозначать его как D(q), где q — индекс итерации. Перед началом первой итерации в качестве текущего множества выбирается все множество D (D(1)=D), и для него некоторым способом вычисляется значение верхней оценки для целевой функции max f(x) ≤ ξ( D(1)). Стандартная итерация алгоритма состоит из следующих этапов:
1) если можно указать план x(q)<D(q), для которого f(x(q))≤ξ( D(q)), то x(q)=х* — решение задачи (*).
2) если такой план не найден, то область определения D(q) некоторым образом разбивается на подмножества D1(q), D2(q), ..., Dlq(q), удовлетворяющие условиям:
Для каждого подмножества находятся оценки сверху (верхние границы) для целевой функции ξD1(q), ξD2(q), ..., ξDl1(q), уточняющие ранее полученную оценку ξD(q), то есть ξDi(q) ≤ ξD(q), i<1:lq. Возможно одно из двух:
2.1) если существует такой план х(q), что то этот план оптимальный.
![]()
2.2) если такой план не найден, то выбирается одно из множеств Di(q), i>1:lq (как правило, имеющее наибольшую оценку.
![]()
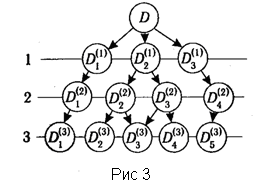
Все имеющиеся к текущему моменту концевые подмножества, т. е. те подмножества, которые еще не подверглись процессу дробления, переобозначаются как D1(q+1), D2(q+1),..., Dl(q+1)(q+1), после чего процесс повторяется.
Схема дробления множества D представлена на рис.3 в виде графа. Существуют и более сложные системы индексации подмножеств, при которых не требуется их переобозначение на каждом шаге.
Конкретные реализации метода ветвей и границ связаны с правилами разбиения на подмножества (правилами ветвления) и построения оценок значений целевых функций на данных подмножествах (границ).
5.2 Решение ЦЗЛП методом ветвей и границ
Рассмотрим применение алгоритма метода ветвей и границ для решения ЦЗЛП (4.2)-(4.3). Как уже упоминалось, через D(q) обозначается подмножество множества допустимых планов задачи. Перед началом первой итерации (q = 1) в качестве текущего множества берется все множество D (D(1) = D), после чего решается стандартная задача линейного программирования (D(1), f). Нетрудно заметить, что она является непрерывным аналогом исходной задачи 2-3.
Если найденный оптимальный план ![]() (1) содержит только целочисленные
компоненты, то он является и оптимальным планом для 2-3:
(1) содержит только целочисленные
компоненты, то он является и оптимальным планом для 2-3: ![]() (1) = x*. В противном случае значение f(
(1) = x*. В противном случае значение f(![]() (1)) становится оценкой (верхней
границей) значения целевой функции на множестве D(1), и мы переходим к выполнению стандартной итерации
алгоритма. Опишем входящие в нее этапы.
(1)) становится оценкой (верхней
границей) значения целевой функции на множестве D(1), и мы переходим к выполнению стандартной итерации
алгоритма. Опишем входящие в нее этапы.
1) Выбирается некоторая нецелочисленная
компонента плана ![]() k(q).
Поскольку в оптимальном плане она должна быть целой, то можно наложить
ограничения xk ≤ [
k(q).
Поскольку в оптимальном плане она должна быть целой, то можно наложить
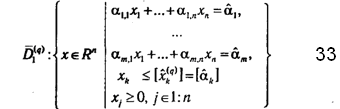
ограничения xk ≤ [![]() k(q)] и xk ≥
[
k(q)] и xk ≥
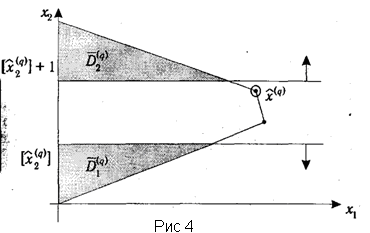
[![]() k(q)]+1. Таким образом, D(q) разбивается на подмножества
k(q)]+1. Таким образом, D(q) разбивается на подмножества
Графическая интерпретация такого разбиения множества D(q) приведена на рис.4.
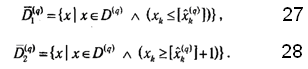
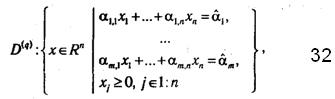
2) Решаются задачи линейного программирования
![]()
Соответствующие максимальные значения целевой функции принимаются как ее оценки на этих множествах:
![]()
Если оптимальный план ![]() для одной из решенных
задач удовлетворяет условию
для одной из решенных
задач удовлетворяет условию
![]()
и содержит только целые компоненты, то, значит, найдено решение основной задачи 2-3. В противном случае среди всех концевых подмножеств, полученных как на предыдущих (Di(q)), так и на текущем (D1(q), D2(q)) этапе, выбирается область с наибольшей оценкой ξ(Di(q)). Она становится текущим рассматриваемым подмножеством (D(q+1)). Далее производится перенумерация концевых множеств и вычислительный процесс итеративно повторяется.
При решении задач (D1(q), f) и (D2(q), f) можно воспользоваться
результатами решения предыдущей задачи (D(q), f). Рассмотрим вариант организации вычислительного
процесса на примере задачи (![]() 1(q), f)
(для (
1(q), f)
(для (![]() 2(q), f) он выглядит аналогично с точностью до знаков
неравенств).
2(q), f) он выглядит аналогично с точностью до знаков
неравенств).
Предположим, что на последнем шаге решения задачи (D(q), f) был получен оптимальный
базис β. Без ограничения общности можно считать, что он состоит из первых
m столбцов матрицы задачи. Данное предположение делается исключительно для
обеспечения наглядности дальнейшего изложения и очевидно, что его выполнения
можно всегда добиться за счет простой перенумерации
векторов аj. По аналогии с
предыдущим параграфом введем обозначения для элементов матрицы задачи (D(q), f) и ее вектора ограничений
относительно базиса ![]() :
:
![]()
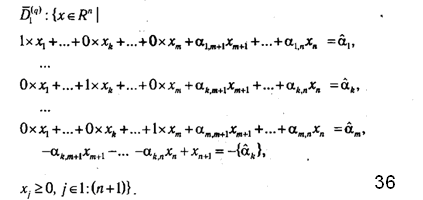
Тогда система ограничений задачи (D(q), f) может быть представлена как
а получаемая на ее основе система
ограничений задачи (![]() 1(q), f)
как
1(q), f)
как
Или
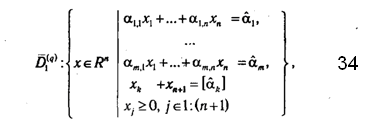
где хn+1 ≥ 0 — фиктивная переменная, которой соответствует нулевой коэффициент в целевой функции, добавляемая для преобразования неравенства в строгое равенство.
Очевидно, что 1≤k≤m, т. к.
небазисные компоненты оптимального плана (m+1≤j≤n) равны нулю, т.
е. являются заведомо целочисленными. Тогда с учетом сделанных предположений о
виде базиса ![]() можно
записать:
можно
записать:
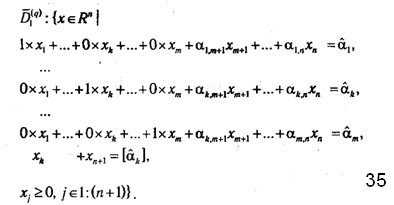
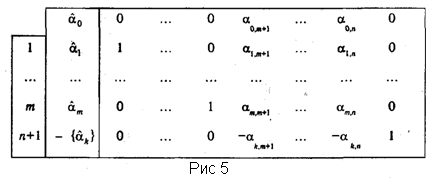
Как видно из 35, в k-м столбце имеется всего два отличных от нуля элемента: в k-й и (m+1)-й строках. Если вычесть из (m+1)-го уравнения k-e, то, учитывая, что [άk] – άk =-{άk}, получим эквивалентную систему:
Проведенные преобразования системы ограничений D1(q) позволили явно выделить сопряженный базис, образуемый столбцами с номерами 1,..., m, n+1, и соответствующий ему псевдоплан (ά1, ..., άm, 0,...., 0, -{άk}), т.е. для решения задачи (D1(q), f) может быть применен алгоритм двойственного симплекс-метода. Практически вычислительный процесс для данного этапа сводится к преобразованию к симплекс-таблицы, показанному на рис.5.
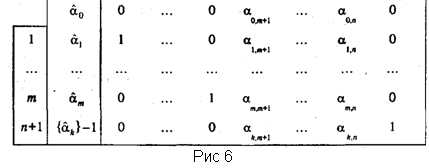
Для случая задачи (D2(q), f) преобразование симплекс-таблицы, получаемое на базе аналогичных рассуждений, приведено на рис.6.
Очевидным недостатком алгоритма метода ветвей и границ при решении задач большой размерности является необходимость перебрать слишком большое количество вариантов перед тем, как будет найден оптимальный план. Однако он отчасти может быть преодолен, если ограничиться поиском не оптимального, а просто "хорошего" (близкого к оптимальному) плана. О степени такой близости и скорости приближения к экстремуму нетрудно судить по изменению значений оценок.
Подчеркнем, что приведенная реализация метода ветвей и границ является одной из многих. Помимо нее, например, очень популярна версия метода решения задачи коммивояжера, в которой для ветвления и построения оценок используют специфические свойства данной модели.
6. Заключение
Дискретные оптимизационные задачи находят широкое применение в различных областях, где используются математические методы для анализа происходящих там процессов. Необходимость решения таких задач приводит к тому, что дискретная оптимизация становится важным элементом образования специалистов, связанных с ее применением при решении задач, возникающих в приложениях. Поэтому технология решения задач дискретного программирования должна стать одной из важных составных частей современного математического образования для специалистов по прикладной математике. В настоящее время разработаны современные методы и алгоритмы решения задач дискретного программирования. Разработаны пакеты прикладных программ, позволяющие решать ряд стандартных задач дискретного программирования. Знание существа применяемых алгоритмов и технологий их реализации позволяет более эффективно использовать разработанные пакеты. При возникновении новых нестандартных задач реализация алгоритмов их решения требует информации о технологии решения задач дискретной оптимизации.
Для изучения материала необходимы знания основ математического анализа, линейной алгебры, линейного программирования и основ теории графов.
