

 Курсовая работа: Анализ основных этапов построения и решения математических моделей оптимизации организационных структур в системе менеджмента качества
Курсовая работа: Анализ основных этапов построения и решения математических моделей оптимизации организационных структур в системе менеджмента качества

Ежедневно необходимо проверять не менее N изделий. Поэтому модель функционирования описывается неравенством:
![]()
При построении целевой функции следует иметь в виду, что расходы фирмы, связанные с контролем, включают две составляющие:
- зарплату контролеров;
- убытки, вызванные ошибками контролеров.
Расходы на одного контролера разряда 1 составляют:
![]()
Расходы на одного контролера разряда 2 составляют:
![]()
Следовательно, минимизируемая целевая функция Z, выражающая ежедневные расходы на контроль, имеет вид
![]()
Для конкретных числовых данных, N=1600 шт.; n1=36 шт.; n2=25 шт.; S1=3 ДЕ/час; S2=2 ДЕ/час; С=0,4 ДЕ; М1=10 шт.; М2=6 шт.; β1=95 %; β2=93% целевая функция примет вид
![]()
или
![]()
а модель функционирования может быть представлена следующим образом:
![]()
или
![]()
![]()
Тогда математическая модель оптимизации может быть представлена в виде:
минимизировать
![]()
![]()
при ограничениях: ![]()
3. Решение задачи оптимизации
3.1 Решение задачи оптимизации графическим методом
При решении задачи оптимизации структуры ОТК в рамках СМК мы имеем задачу линейного программирования с двумя переменными.
Графический метод решения задачи хорошо иллюстрирует основные понятия, используемые при решении задач линейного программирования:
допустимое решение – точка, для которой выполняются все ограничения;
допустимая область – множество всех допустимых решений;
оптимальное решение – лучшее допустимое решение в допустимой области.
Для изображения (рис.1)
допустимой области начертить графики всех ограничений. Все допустимые решения
лежат в первом квадранте, поскольку значения переменных неотрицательны. В силу
ограничения ![]() все допустимые решения (х1,х2)
задачи располагаются по одну сторону от прямой, описываемой уравнением
все допустимые решения (х1,х2)
задачи располагаются по одну сторону от прямой, описываемой уравнением ![]() . Прямую
. Прямую![]() удобно провести, соединяя
пару точек: х1 =10; х2 = 0 и х1 = 10; х2
= 6.
удобно провести, соединяя
пару точек: х1 =10; х2 = 0 и х1 = 10; х2
= 6.
На рисунке допустимая область ограничена линиями, соединяющими точки ABCD. Ясно, что в допустимой области содержится бесконечное число искомых точек. Нужно найти искомую точку с наименьшим значением Z.
Находим координаты точек:
A (х1 = 10; х2 = 0);
B (х1 = 10; х2 = 6);
C (х1 = 1,39; х2 = 6);
D(х1 = 5,5;х2 = 0);
Если заранее зафиксировать
значение целевой функции ![]() , то
соответствующие ему точки будут лежать на некоторой прямой. При изменении
величины Z эта прямая подвергается параллельному
переносу. Рассмотрим прямые, соответствующие различным значениям Z, имеющие с допустимой областью хотя
бы одну общую точку. Начальное значение Z положим равным 257.
, то
соответствующие ему точки будут лежать на некоторой прямой. При изменении
величины Z эта прямая подвергается параллельному
переносу. Рассмотрим прямые, соответствующие различным значениям Z, имеющие с допустимой областью хотя
бы одну общую точку. Начальное значение Z положим равным 257.
1 шаг:
2 шаг:
При приближении прямой к
началу координат значение Z уменьшается. Если
прямая имеет хотя бы одну общую точку с допустимой областью ABC, ее можно смещать в направлении
начала координат. Ясно, что для прямой, проходящей через точку С с координатами
х1 = 1,39; х2 = 6, дальнейшее движение не возможно. Точка
С представляет собой наилучшую допустимую точку, соответствующую наименьшему
значению![]() . Следовательно, х1
= 1,39; х2 = 6 – оптимальное решение и Z = 170,9 ДЕ – оптимальное значение рассматриваемой задачи.
. Следовательно, х1
= 1,39; х2 = 6 – оптимальное решение и Z = 170,9 ДЕ – оптимальное значение рассматриваемой задачи.
Дробное значение х1 = 1,39 соответствует использованию одного из контролеров разряда 1 в течение неполного рабочего дня. При недопустимости неполной загрузки контролеров дробное значение обычно округляют, получая приближенное оптимальное целочисленное решение
х1 = 1; х2 = 6.
Решение х1 = 1; х2 =6 – единственная допустимая точка с минимальным значением Z. Другими словами, значения Z, соответствующие другим допустимым решениям, больше 170,9. В силу этого решение
х1 =1,39; х2 = 6 называется единственным оптимальным значением.
На рис.1 представлено графическое решение задачи.
![]()
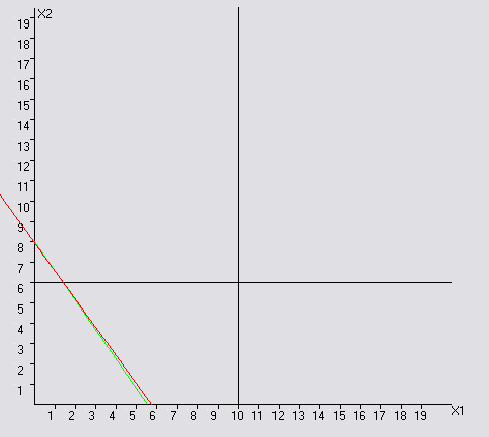
Рис. 1 Графическое решение задачи
3.2 Решение задачи оптимизации методом математического моделирования
Для решения задачи оптимизации используем метод равномерного поиска. Этот метод основан на последовательном переборе значений оптимизируемых параметров с определенным шагом и проверке в них функциональных ограничений. Формируется набор точек из допустимой области решений. Оптимальное решение задачи соответствует точке с минимальным значением целевой функции. На рис.2 приведена блок – схема метода равномерного поиска.
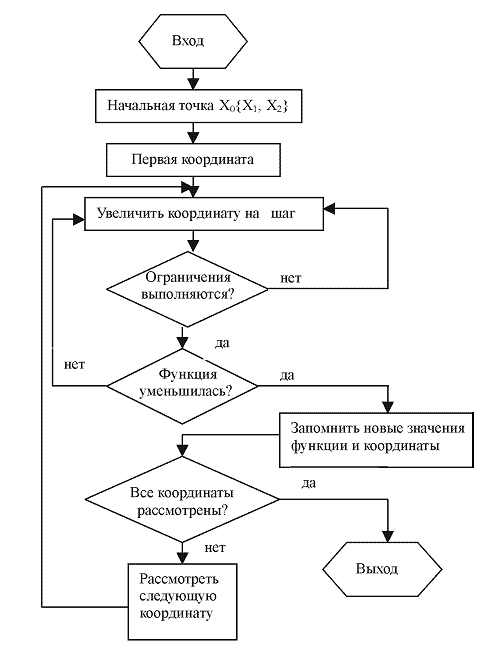
Рис. 2 Блок-схема метода равномерного поиска
По программе, реализующей метод равномерного поиска, рассчитываются значения оптимальных параметров х1 и х2.
4. Реализация на ЭВМ
4.1 Код программы
Public x1, x2, x3, x4 As Double
Public x5, x6, z, d As Integer
Private Sub Command1_Click()
Command2.Enabled = True
Picture1.Cls
Picture2.Cls
x1 = Val(Text4) + Val(Text6) * Val(Text2) * (100 - Val(Text9)) / 100
x2 = Val(Text5) + Val(Text6) * Val(Text3) * (100 - Val(Text10)) / 100
x4 = Val(Text1) / (Val(Text2) * 8)
x3 = Val(Text1) / (Val(Text3) * 8)
Picture2.Print "Z = " & x1 * 8 & "*X1" & "+" & x2 * 8 & "*X2"
Picture2.Print Val(Text2) & "X1+" & Val(Text3) & "X2>=" & Val(Text1) / 8
Picture1.Line (40, 400)-(40, 10)
Picture1.PSet (44, 10), RGB(255, 255, 255)
Picture1.Print "X2"
Picture1.Line (40, 400)-(450, 400)
Picture1.Print "X1"
For i = 1 To 19
Picture1.Line (40, 400 - i * 20)-(35, 400 - i * 20)
Picture1.PSet (20, 400 - i * 20), RGB(255, 255, 255)
Picture1.Print i
Picture1.Line (40 + i * 20, 400)-(40 + i * 20, 405)
Picture1.PSet (30 + i * 20, 405), RGB(255, 255, 255)
Picture1.Print i
Picture1.Line (40 + Val(Text7) * 20, 10)-(40 + Val(Text7) * 20, 400)
Picture1.Line (40, 400 - Val(Text8) * 20)-(450, 400 - Val(Text8) * 20)
Picture1.Line (40, 400 - x3 * 20)-(40 + x4 * 20, 400), RGB(0, 255, 0)
Next
End Sub
Private Sub Command2_Click()
Picture3.Cls
x6 = (Val(Text1) - Val(Text2) * 8 * Val(Text7)) / (Val(Text3) * 8)
x5 = (Val(Text1) - Val(Text3) * 8 * Val(Text8)) / (Val(Text2) * 8)
z = Val(Text7) * x1 * 8 + Val(Text8) * x2 * 8
If Val(Text2) / Val(Text3) > x1 / x2 Then
d = x5 * 8 * x1 + Val(Text8) * 8 * x2
Picture3.Print d
Picture1.Line (40 + (z / (8 * x1) * 20) - (Val(Text7) - x5) * 20, 400)-(40 - (Val(Text7) - x5) * 20, 400 - (z / (8 * x2) * 20)), RGB(255, 0, 0)
Else
Picture1.Line (40 + (z / (8 * x1) * 20), 400 + (Val(Text8) - x6) * 20)-(40, 400 - (z / (8 * x2) * 20) + (Val(Text8) - x6) * 20), RGB(255, 0, 0)
d = Val(Text7) * 8 * x1 + x6 * 8 * x2
Picture3.Print d
End If
End Sub
Private Sub Command3_Click()
End
End Sub
Private Sub Command4_Click()
Form2.Show
End Sub
Private Sub Form_Load()
Command2.Enabled = False
End Sub
Программа написана на языке программирования Visual Basic v. 6.0
4.2 Внешний вид и результаты вычисления программы
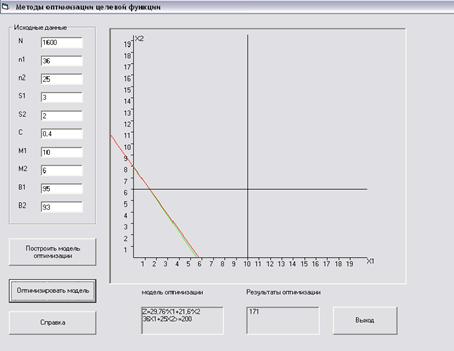
Рис. 3 Результаты вычисления программы
На рис.3 показан интерфейс разработанной программы и результаты её вычисления.
оптимизация математическое моделирование менеджмент
5. Анализ полученных результатов
Сравнив значения оптимальных параметров найденных графическим методом и методом математического моделирования можно прийти к выводу, что они совпадают и погрешность расхождения результатов не превышает 0,5%.
Результаты проведенных исследований занесены в бланк отчета:
Исходные данные:
| № | N |
n1 |
n2 |
S1 |
S2 |
C |
M1 |
M2 |
β1 |
β2 |
| п/п | шт. | шт. | шт. | ДЕ/час | ДЕ | шт. | шт. | % | % | |
| 13 | 1600 | 36 | 25 | 3 | 2 | 0,4 | 10 | 6 | 95 | 93 |
Условные обозначения величин:
N - норма выработки изделий группой контролеров ОТК за 8-ми часовой рабочий день;
n1 - Количество изделий, проверяемых контролером 1 разряда в час;
n2 - Количество изделий, проверяемых контролером 2 разряда в час;
S1 - Заработная плата контролера 1 разряда;
S2 - Заработная плата контролера 2 разряда;
С - Убыток, который несет предприятие при каждой ошибке контролера;
М1 - Количество контролеров 1 разряда, которое может использовать предприятие;
М2 - Количество контролеров 2 разряда, которое может использовать предприятие;
В1 - %случаев, когда контролер 1 разряда не ошибается;
В2 - % случаев, когда контролер 2 разряда не ошибается;
Формирование математической модели оптимизации
Функция цели:
![]()
Модель функционирования:
![]()
Областные ограничения:
х1 ≤ 10;
х2 ≤ 6;
х1 ≥ 0;
х2 ≥ 0.
Результаты вычислений:
х1опт =1,39;
х2опт = 6;
Zопт = 170,9.
Таким образом, оптимальное количество контролеров 1 разряда (х1) равно 1,39 ед. (при недопустимости неполной загрузки контролеров округляется до 2), а контролеров 2 разряда (х2) равно 6 ед., при этом минимизируемая целевая функция Z, выражающая ежедневные расходы на контроль равна 170,9 ДЕ.
Выводы
В ходе выполнения курсовой работы были изучены описания основных этапов построения и решения математических моделей оптимизации организационных структур в системе менеджмента качества, в частности, отдела технического контроля промышленного предприятия. Реализованы решения задач расчета оптимальной численности отдела технического контроля предприятия графическим методом и методом математического моделирования, которые часто используются при оптимизации как организационных структур всего промышленного предприятия, так и его подразделений при реализации основных функций управления качеством.
Приобретены практические навыки построения и решения математических моделей оптимизации в системе менеджмента качества.
Освоены приемы применения средств вычислительной техники для решения оптимизационных задач – разработана программа, реализующая данные методы и существенно упрощающая процесс поиска оптимального решения.
Список использованной литературы
1. Никифоров А.Д. Управление качеством: Учебное пособие для ВУЗов. – М.: Дрофа, 2004
2. Никифоров А.Д., Ковшов А.Н., Назаров Ю.Ф. Процессы управления объектами машиностроения. М.,2000
3. Никифоров А.Д. Бойцов В.В. Инжереные методы обеспечения качества в машиностроении: Учебное пособие. – М.: Изд-во стандартов, 1987
4. Михалевич В.С., Волкович В.Х. Вычислительные методы исследования и проектирования сложных систем. – М., 1988
5. Ткаченко В.В. и др. Система оптимизации параметров объектов стандартизации. М.: Изд-во стандартов, 1977
