

 Дипломная работа: Использование алгоритмов искусственного интеллекта в процессе построения UFO-моделей
Дипломная работа: Использование алгоритмов искусственного интеллекта в процессе построения UFO-моделей
– управление информационными потоками и сетями;
– управление воздушным движением;
– информационный поиск;
– электронная коммерция;
– обучение;
– электронные библиотеки.
К построению агентно-ориентированных систем можно указать два подхода: реализация единственного автономного агента или разработка мультиагентной системы. Автономный агент взаимодействует только с пользователем и реализует весь спектр функциональных возможностей, необходимых в рамках агентно-ориентированной программы. В противовес этому мультиагентные системы являются программно-вычислительными комплексами, где взаимодействуют различные агенты для решения задач, которые трудны или недоступны в силу своей сложности для одного агента. Часто такие мультиагентные системы называют агентствами, в рамках которых агенты общаются, кооперируются и договариваются между собой для поиска решения поставленной перед ними задачи.
Агентные технологии обычно предполагают использование определенных типологий агентов и их моделей, архитектур мультиагентных систем и опираются на соответствующие агентные библиотеки и средства поддержки разработки разных типов мультиагентных систем.
Умные агенты применяются различными способами. Например, существует агент-фильтр, использующийся для фильтрации информации из сети Интернет. Параметры поиска Web-агента задаются в простом файле конфигурации. Затем агент автономно собирает новости через протокол NNTP и предоставляет их пользователю с помощью HTTP-протокола, действуя аналогично Web-серверу [42].
1.2.6 Алгоритм муравья
Алгоритмы муравья – это сравнительно новый метод, который может использоваться для поиска оптимальных путей по графу. Данные алгоритмы симулируют движение муравьев в окружающей среде и используют модель ферментов для коммуникации с другими агентами [43].
Хотя муравьи и слепы, они умеют перемещаться по сложной местности, находить пищу на большом расстоянии от муравейника и успешно возвращаться домой. Выделяя ферменты во время перемещения, муравьи изменяют окружающую среду, обеспечивают коммуникацию, а также отыскивают обратный путь в муравейник.
Самое удивительное в данном процессе – это то, что муравьи умеют находить самый оптимальный путь между муравейником и внешними точками. Чем больше муравьев используют один и тот же путь, тем выше концентрация ферментов на этом пути. Чем ближе внешняя точка к муравейнику, тем больше раз к ней перемещались муравьи. Что касается более удаленной точки, то ее муравьи достигают реже, поэтому по дороге к ней они применяют более сильные ферменты. Чем выше концентрация ферментов на пути, тем предпочтительнее он для муравьев по сравнению с другими доступными. Так муравьиная "логика" позволяет выбирать более короткий путь между конечными точками.
Алгоритмы муравья интересны, поскольку отражают ряд специфических свойств, присущих самим муравьям. Муравьи легко вступают в сотрудничество и работают вместе для достижения общей цели. Алгоритмы муравья работают так же, как муравьи. Это выражается в том, что смоделированные муравьи совместно решают проблему и помогают другим муравьям в дальнейшей оптимизации решения.
Рассмотрим пример [15]. Два муравья из муравейника должны добраться до пищи, которая находится за препятствием. Во время перемещения каждый муравей выделяет немного фермента, используя его в качестве маркера.
При прочих равных каждый муравей выберет свой путь. Пусть первый муравей выбирает путь, который в два раза длиннее, чем путь, выбранный вторым муравьем. Так как путь второго муравья в два раза короче пути первого муравья, то, когда второй муравей достигнет цели, первый муравей в этот момент пройдет только половину пути.
Когда муравей достигает пищи, он берет один из объектов и возвращается к муравейнику по тому же пути. Когда второй муравей вернется в муравейник с пищей, первый муравей еще только достиг пищи.
При перемещении каждого муравья на пути остается немного фермента. Для первого муравья за это время путь был покрыт ферментом только один раз. В то же самое время второй муравей покрыл путь ферментом дважды. Когда первый муравей вернется в муравейник, второй муравей уже успеет еще раз сходить к еде и вернуться. При этом концентрация фермента на пути второго муравья будет в два раза выше, чем на пути первого. Поэтому первый муравей в следующий раз выберет путь второго муравья, поскольку там концентрация фермента выше.
В этом и состоит базовая идея алгоритма муравья – оптимизация путем непрямой связи между автономными агентами.
1.3 Постановка задачи
Проведенный анализ современного состояния проблемы показывает, что:
– в современных технологиях построения систем процесс построения моделей приходится осуществлять проектировщику вручную, основываясь на своем опыте и интуиции с помощью CASE-средств;
– современные прикладные методы и технологии искусственного интеллекта ориентированы не столько на копирование поведения человека, сколько на достижение результатов, аналогичных человеческим результатам;
– для автоматического построения моделей систем целесообразно применить алгоритм муравья.
Целью данной магистерской аттестационной работы является исследование возможности использования алгоритмов искусственного интеллекта в процессе построения UFO-моделей.
Достижение сформулированной цели связано с решением следующих задач:
– адаптация алгоритма муравья к процессу построения UFO-модели из заданных компонентов;
– использование Microsoft Excel в процессе построения UFO-модели из заданных компонентов;
– применение полученных результатов в процессе UFO-моделирования.
2. Адаптация алгоритма муравья к задаче построения UFO-модели из заданных компонентов
2.1 Начальное размещение муравья
Пусть задана контекстная диаграмма системы, определяющая ее множество входов и выходов (рис. 2.1).
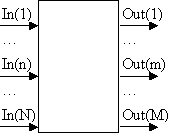
Рисунок 2.1 – Контекстная диаграмма системы
Изначально муравей может находиться в одной из двух видов точек [44]:
– в конце любой входной стрелки In (n) (n = 1, 2, …, N);
– в начале любой выходной стрелки Out (m) (m = 1, 2, …, M).
Например, контекстная диаграмма системы может иметь два входа (In (1), In (2)) и три выхода (Out (1), Out (2), Out (3)), а муравей – находиться в конце входной стрелки In (1). Данная ситуация иллюстрируется рис. 2.2, на котором муравей условно изображен жирной точкой.
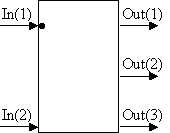
Рисунок 2.2 – Пример начального размещения муравья
2.2 Правила соединения UFO-компонентов
Пусть задана библиотека
компонентов ![]() , из которых необходимо
собрать систему, заданную контекстной диаграммой, изображенной на рис. 2.1.
Каждый компонент
, из которых необходимо
собрать систему, заданную контекстной диаграммой, изображенной на рис. 2.1.
Каждый компонент ![]() библиотеки тоже
характеризуется своим множеством входов
библиотеки тоже
характеризуется своим множеством входов ![]() ,
а также – своим множеством выходов
,
а также – своим множеством выходов ![]() (рис.
2.3).
(рис.
2.3).
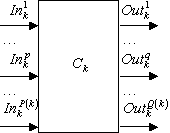
Рисунок 2.3 – Контекстная
диаграмма компонента ![]()
Входы и выходы
контекстной диаграммы системы и компонентов имеют такую характеристику как тип.
Существуют следующие правила соединения входов и выходов [11]. Вход In (n)
контекстной диаграммы системы может быть присоединен к входу ![]() компонента
компонента ![]() , если тип In (n) совпадает
с типом
, если тип In (n) совпадает
с типом ![]() . Это условие совпадение
типов можно записать в виде равенства
. Это условие совпадение
типов можно записать в виде равенства ![]() (рис.
2.4).
(рис.
2.4).
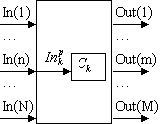
Рисунок 2.4 – Соединение входа с входом
Выход Out (m) контекстной диаграммы системы может быть присоединен к
выходу ![]() компонента
компонента ![]() , если тип Out (m) совпадает с типом
, если тип Out (m) совпадает с типом ![]() .
Это условие можно записать в виде равенства
.
Это условие можно записать в виде равенства ![]() (рис.
2.5).
(рис.
2.5).
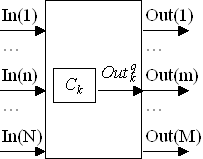
Рисунок 2.5 – Соединение выхода с выходом
Выход ![]() компонента
компонента ![]() может быть присоединен к
входу
может быть присоединен к
входу ![]() компонента
компонента ![]() , если тип
, если тип ![]() совпадает с типом
совпадает с типом![]() . Это условие можно
записать в виде равенства
. Это условие можно
записать в виде равенства ![]() (рис.
2.6).
(рис.
2.6).
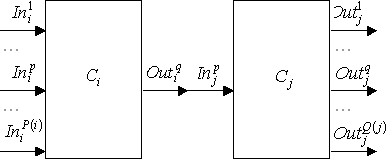
Рисунок 2.6 – Соединение выхода с входом
Пусть контекстная диаграмма системы имеет вход a и выход b (рис. 2.7).
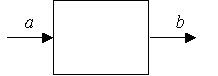
Рисунок 2.7 – Пример контекстной диаграммы системы
Пусть в библиотеку компонентов входит компонент С1 с входом a и выходом c и компонент С2 с входом c и выходом b (рис. 2.8).
Страницы: 1, 2, 3, 4, 5, 6, 7, 8, 9
